3.6. 手腕轴负荷允许值
3.6. 手腕轴负荷允许值
粘贴于机器人手腕轴前端的负荷根据允许重量、允许负荷扭矩、允许惯性矩而定。
 允许架板重量 :
允许架板重量 :
表 3‑3 允许架板重量
机器人型号 | 允许架板重量 |
HA006A/HA006L | 58.8 N (6kgf) 以内 |
 允许负荷扭矩
允许负荷扭矩
表 3‑4 允许负荷扭矩
机器人型号 | 允许负荷扭矩 | ||
R2轴旋转 | B轴旋转 | R1轴旋转 | |
HA006A | 11.8 Nm (1.2kgf·m) 以内 | 9.8 Nm (1.0kgf·m) 以内 | 5.9 N·m (0.6 kgf·m) 以内 |
HA006L | 39.2 Nm (4kgf·m) 以内 | ||
 允许惯性矩
允许惯性矩
表 3‑5 允许惯性矩
机器人型号 | 允许惯性计算例 | ||
R2轴旋转 | B轴旋转 | R1轴旋转 | |
HA006A | 2.65 kgm²(0.27kgfms²) | 2.65 kgm²(0.27kgfms²) | 0.59 kgm²(0.06kgfms²) |
HA006L | 0.88 kgm²(0.088kgfms²) | ||
请参考[3-3]~[3-5]、使用时负荷不能超过允许条件。
[图3.12, 3.13]所显示的是假设贴附的负荷在于质点时其质点所处的区域范围。但、几乎不会出现实际负荷(End Effector)处于质点的情况、因此、通过求算各轴的惯性矩来进行评估。假设贴附的负荷在于质点时、
(例)机器人型号为【HA006A】、所贴附的负荷重量为5.74Kg时

图 3.12 2-D 负载模型
M – 负载重量
Jxx -从负载重心到X方向上的转动惯量
Jyy -从负载重心到Y方向上的转动惯量
Jzz -从负载重心到Z方向上的转动惯量
Ja4 - R2轴旋转中心的转动惯量
Ja5 - B轴旋转中心的转动惯量
Ja6 - R1轴旋转中心的转动惯量
☞ 负载条件: 长度和宽度为 100mm、厚度为200mm的铝块(总重量5.74kg)
① 允许转矩的限值
B 轴重心位置 LX = 155mm、LY = 0mm、LZ = -25.5mm
如果您要使用转矩图中的 B 和 R1 轴长度的限值、参考下列公式。
B 轴基线长度 
R1 轴基线长度 
② 允许转动惯量的限值
重心上负载的转动惯量 Jxx= 0.024kgm2、Jyy= 0.01 kgm2、Jzz= 0.024 kgm2
B 轴转动惯量(Ja5)

R1 轴转动惯量(Ja6)

③ 总结
因为重量、转矩和转动惯量都符合限制条件、所以这个模型是安全的
n R1 轴中心的允许中心位置
① 从允许扭矩看时的允许中心位置
LR1 ≤ (允许扭矩) / (负荷重量)
LR1 = 5.9 N·m / (5.74Kg×9.8 m/s2) = 0.104 m
⑥ 从允许惯性矩看时的允许中心位置
LR1 ≤ (允许惯性矩/负荷重量 )1/2
= (0.104 kg·m2 / 5.74kg)1/2 = 0.135 m
综上所述、R1轴中心的距离根据允许扭矩而受限制、其值为0.104m以内。
n B 轴中心的允许中心位置
(该机器人的B轴中心位于同一轴上、并且、允许负荷扭矩、允许惯性矩的B轴、R2轴值相同。 因此、如果满足B轴的允许条件、就能满足R2轴的允许条件。)
① 从允许扭矩看时的允许中心位置
LB ≤ (允许扭矩) / (负荷重量)
LB = 9.8 N·m / (5.74Kg×9.8 m/s2) = 0.174 m
② 从允许惯性矩看时的允许中心位置
LB ≤ (允许惯性矩 /负荷重量 )1/2
= (2.65 kg·m2 / 5.74kg)1/2 = 0.679 m
综上所述、B轴中心的距离根据允许扭矩而受限制、其值为0.174m以内。
n Torque Map
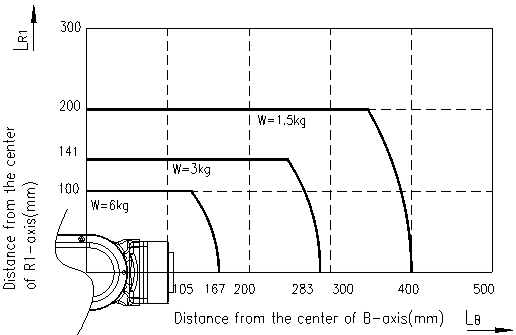
图 3.13 手腕轴扭矩线图