3.6.1. 允许负载转矩的估算
3.6.1. 允许负载转矩的估算
加载到机器人腕轴机械连接面的负载受到容许重量、容许负载转矩和容许转动惯性的限制。
n 第1步
根据 B 轴的转动中心计算出重心位置(LX、LY、LZ)
LX: X 轴的重心位置
LY: Y 轴的重心位置
LZ: Z 轴的重心位置
n 第2步
依据转矩图、核对从 B 轴和 R1 轴的中心到重心的位置。
 、
、 
在 B 轴上的长度(LB)≤ 0.606 m
在 R1 轴上的长度(LR1)≤ 0.303 m
LX : 从 B 轴旋转中心到 X 轴方向上的重心位置
LY: 从 B 轴旋转中心到 Y 轴方向上的重心位置
LZ: 从 B 轴旋转中心到 Z 轴方向上的重心位置
LB: 从 B 轴旋转中心到重心的长度
LR1: 从 R1 轴旋转中心到重心的长度
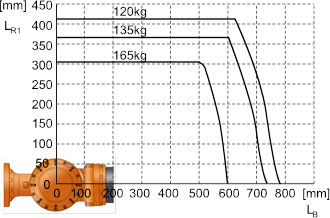
图3.7 腕轴转矩图:[HS165]
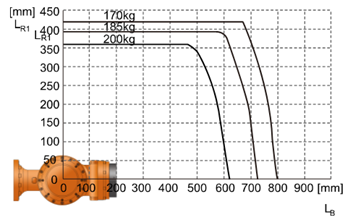
图 3.8 腕轴转矩图:[HS200]
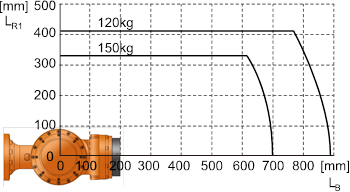
图 3.9 腕轴转矩图:[HS150L]
 容许负载转矩
容许负载转矩
表 3‑1 容许负载转矩
机器人型号 | 容许负载转矩 | ||
R2 轴旋转 | B 轴旋转 | R1 轴旋转 | |
HS165/HS150L | 小于 1、030N·m(105kgf·m) | 小于 490N·m(50kgf·m) | |
HS200 | 小于 1、333N·m(136kgf·m) | 小于 706N·m(72kgf·m) | |