3.6.2. 允许转动惯量的估算
3.6.2. 允许转动惯量的估算
负载必须在如【图 3.7 ~ 图 3.8】所示的最大负载条件之下。
n 第1步
计算每一个轴中心负载的转动惯量值(Ja4、Ja5、Ja6)
Ja4 - R2 轴旋转中心的转动惯量
Ja5 - B 轴旋转中心的转动惯量
Ja6 - R1 轴旋转中心的转动惯量
n 第2步
核查基于惯量图的静负载的转动惯量值是否在限定范围内。
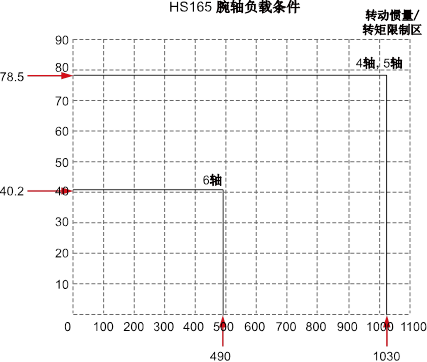
图 3.10 腕轴负载条件: [HS165]
 容许转动惯量
容许转动惯量
表 3‑2 容许转动惯量
机器人型号 | 容许转动惯量 | ||
R2 轴旋转 | B 轴旋转 | R1 轴旋转 | |
HS165/HS150L | 78.5kg·m²(8kgf·m·s²) | 40.2kg·m²(4.1kgf·m·s²) | |
HS200 | 142.3kg·m²(14.4kgf·m·s²) | 78.5kg·m²(8kgf·m·s²) | |