1.6.2. 机器人及周边机械的布置
1.6.2. 机器人及周边机械的布置
| 必须按照以下方法布置机器人和周边器械。 |

(1) 连接控制器或周边装置的一次电源之前,须确认供应处电源是否已关闭。因为一次电源使用 220 V、440 V等高电压,有可能会发生触电事故。
(2) 在防护栏的出入口贴附[运行中禁止出入 标示板,并向工作人员提醒。
(3) 控制器、联锁装置、其他操作板等应设计成在防护栏外部也可进行操作。
(4) 安装操作板时应在操作板贴附紧急停止按钮,发生紧急情况时可在任何地方都能即时停止设备。
(5) 机器人机体和控制器、联锁装置(Interlock)、定时器(Timer)等的配线及配管类不得妨碍工作人员的移动途径或叉车(Forklift)移动途径,有可能因工作人员的传导、配线的断线导致事故。
(6) 控制器、联锁装置(Interlock)、操作板等应布置在易于查看机器人工作情况的地方。如果布置在不易查看到机器人工作情况的地方,机器人发生异常或工作人员操作机器人时会有发生重大事故的危险。
(7) 如果机器人工作区域比机器人的工作范围小,就应限制机器人的工作区域。这时,可通过软限制(Soft limit)、机械定位停止梢(Stopper) 等来进行限制。如果采用此设置,机器人的工作范围因出现异常等超出工作区域时可事先停止设备。(请参考机器人维护说明书。)
(8) 焊接时如果飞溅(Spatter)等落在工作人员身上或周围,就有烧伤或火灾危险。请在确保机器人监控范围的情况下安装遮光板、防护罩(Cover)等。
(9) 机器人的自动、手动操作模式应安装在显眼装置,以便在远处也可识别工作模式。开始自动运行时,可通过蜂鸣器(Buzzer)或警示灯等发出警报。
(10) 机器人的周边装置不能有突出部,必要时请利用防护罩等盖住突出部,以防止工作人员不小心触摸突出部时的事故危险及因机器人的动作受惊而引起的重大事故。
(11) 请勿把手伸进防护栏内部进行搬入、搬出作业物等的系统操作,有可能会导致压榨、切断等事故。
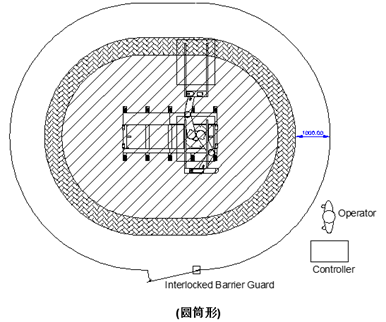
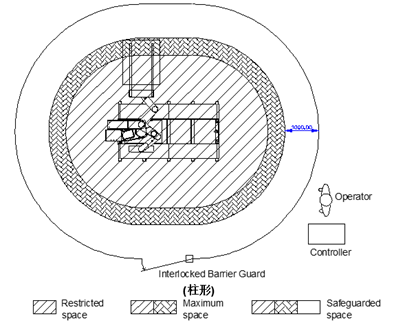
图 1.3 LCD用机器人周边装置与工作人员的布置
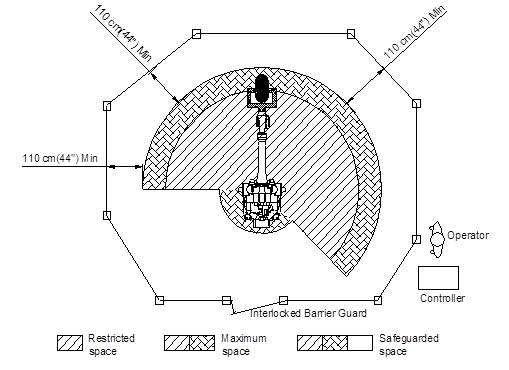
图 1.4 工业用机器人周边装置与工作人员的布置