6.5.1. 归零设定
6.5.1. 归零设定
(1) 将控制器设定为学习模式,开启电机。 如果发生异常情况导致无法设定电机为开启,则使用刹车释放开关将机器人设定到起始位置。
(2) 将相关的轴摆放到起始的位置,然后使用刻度标记对其进行设定。
(3) 重设编码器。有关编码器重设的方法请参考『6.5.2编码器重设』。
(4) 纠正编码器时,参考『控制器操作手册』。
(5) 确保机器人移动时不会出问题。

图6.2 原点设置方法(HX200L/HX200L-2000/HX300/HX300L/HX400)
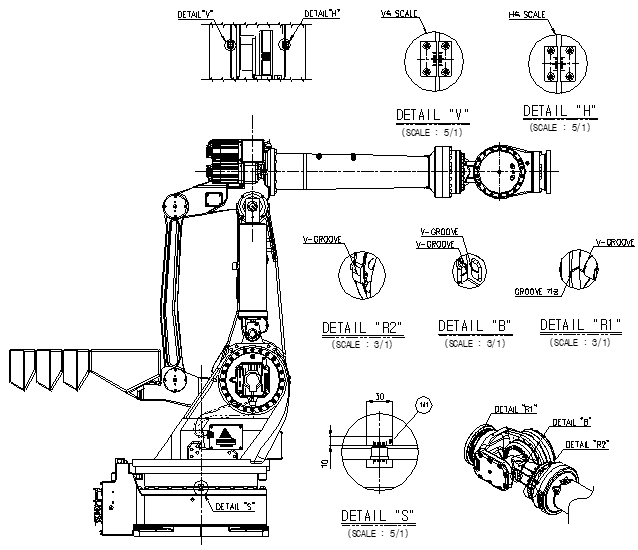
图6.3 原点设置方法 (HX500)