6.1.11.2. 原因及检查方法
6.1.11.2. 原因及检查方法
< 马达On的瞬间或非定期发生错误时> (1) 请检查马达驱动用配件。 n 请检查连接于伺服驱动装置的输出电缆。 n 请检查伺服驱动装置内Switching素子的端子。 n 请替换CNBS1、2、3电缆后确认错误。 n 请替换伺服基板(BD542)后确认错误。 n 请替换伺服驱动装置后确认错误。 n 请替换伺服马达后确认错误。
< 在特定步骤发生时> (2) 请在发生错误的步骤检查机器人。 n 请在发生错误的位置确认机器人的配线。 n 请降低机器人的工作速度并确认速度。 n 请变更示教步骤的插补后确认错误。 |
(1) 请检查马达驱动用配件。
驱动马达的伺服驱动装置通过CNBS电缆从伺服基板(BD542)接收指令、内部的增幅电路电流输出通过各轴连接器的配线传达到马达。
n 检查连接于伺服驱动装置的输出电缆
检查从伺服驱动装置连接到马达的配线状态。检查时在关闭控制器电源的状态下从伺服驱动装置分开连接器后检测电缆侧的各相电缆和接地间阻抗值并确认短路与否。
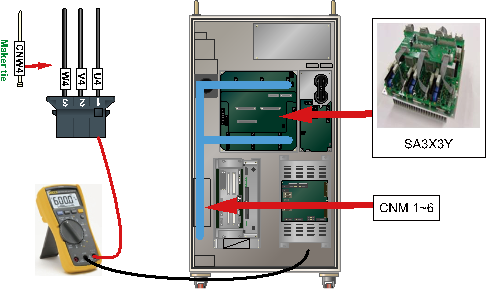
图 6.59 检查Hi5-N00控制器的伺服驱动装置输出电缆
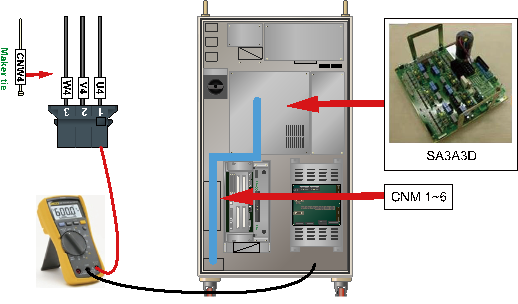
图 6.60 检查Hi5-N30控制器的伺服驱动装置输出电缆
n 检查伺服驱动装置的Switching素子
伺服驱动装置的Switching 素子会Switching从二极管模块供应的直流电压、按各相输出交流电流。如果在Switching素子的内部端子发生短路、就会发生过流、从而发生IPM错误。请在分开连接器的状态下确认伺服驱动装置的Switching素子的输出端子和P或N间的短路与否。如果确认到短路、就需要替换伺服驱动装置、而且需要检查从伺服驱动装置连接到马达的电缆。
Ø 中型机器人用伺服驱动装置: SA3X3Y
Ø 小型机器人用伺服驱动装置: SA3A3D
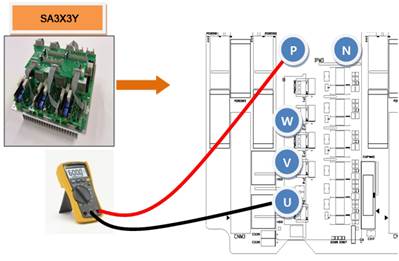
图6.61 检查SA3X3Y的Switching素子短路与否
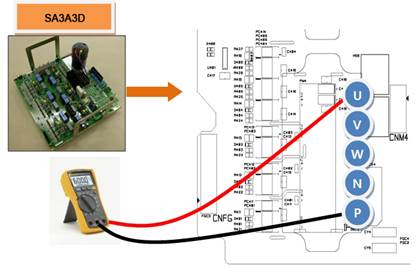
图6.62 检查SA3A3D的Switching素子短路与否
n 替换CNBS电缆后确认错误
驱动马达的伺服驱动装置通过CNBS电缆从伺服基板(BD542)接收指令、内部的增幅电路电流输出通过连接与各轴连接器的配线传达到马达。替换电缆后不发生错误就表示电缆的不良。请把CNBS电缆替换成正常品。
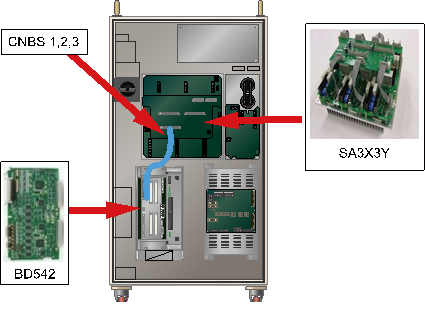
图 6.63 Hi5-N00控制器的马达驱动相关配件排列
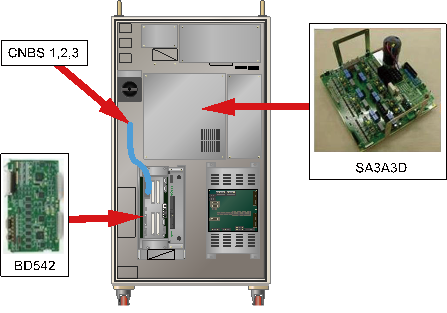
图 6.64 Hi5-N30控制器的马达驱动相关配件排列
n 伺服基板(BD542)的替换检查
替换伺服基板(BD542)后不发生错误、就是伺服基板(BD542)不良。请把伺服基板(BD542)替换为正常品。
n 伺服驱动装置的替换检查
替换伺服驱动装置后不发生错误、就是伺服驱动装置的不良。请把伺服驱动装置替换成正常品。
Ø 中型机器人用伺服驱动装置: SA3X3Y
Ø 小型机器人用伺服驱动装置: SA3A3D
n 伺服马达的替换检查
替换伺服马达后不发生错误、就是伺服马达的不良。请把伺服马达替换成正常品。下图显示HS165机器人的各轴马达位置、其它机器人请参考该型号维修说明书后替换
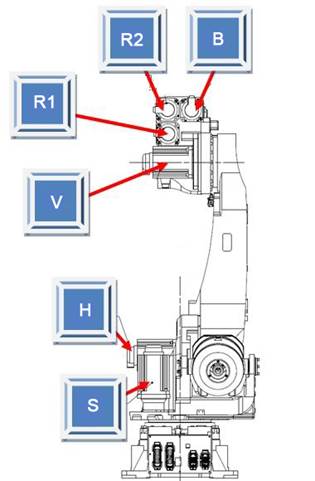
图 6.65 HS165机器人的各轴马达位置
(2) 请在发生错误的步骤中检查机器人。
IPM错误在特定步骤发生、就表示在示教的步骤器具配线的受损大或示教程序的姿势变换而导致轴速度大幅变化。
n 请在发生错误的位置检查机内配线
检查连接到机器人内部马达的该轴的配线状态。检查时在关闭控制器电源的状态下从伺服驱动装置分开输出连接器后检测电缆侧的各相和接地间阻抗值并确认短路与否。
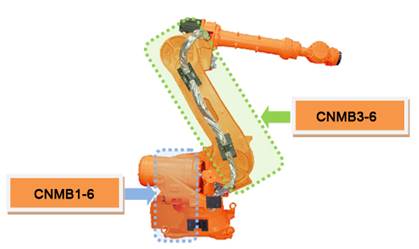
图 6.66 HS165的各轴别机内配线检查位置
n 降低机器人的工作速度并确认错误
机器人的姿势变化引发轴速度的急剧变化、在此步骤中发生错误时请确认工作速度。降低工作速度后错误消失、就变更该步骤的示教速度并记录作业程序。
n 变更示教步骤的插补并确认错误
将工作速度降低至75%以下时轴速度会急剧变化、请把示教步骤的插补变更为‘P’后确认错误。如果在相同的工作速度只通过修改插补就能解决错误、就请修改示教插补。
(3) 请检查控制器的冷却扇
机器人启动5分钟以上后发生IPM故障是控制器冷却系统发生异常而超出IPM动作容许温度的情况。控制器的后面使用伺服驱动装置的散热板和再生放电电阻的冷却扇。
表 6-4 各控制器冷却扇的位置
Hi5-N* | Hi5-C1* | Hi5-C0* |
|
|
|


n 检查各冷却扇的动作状态
冷却扇不转动或速度低至不正常时请进行更换。冷却扇的寿命取决于运行环境及使用时间。.
n 检查冷却扇电源的电压
所有的冷却扇均不运行时请确认输入电压。冷却扇的输入电压设置为AC 220V,容许范围在额定电压的10%以内。电压低于10%以上时冷却扇转动速度变低从而降低冷却效果。电压变低时请确认冷却扇电源用连接器(CNFN2)和控制器的输入电压。