6.1.13.2. 原因及检查方法
6.1.13.2. 原因及检查方法
(1) 请确认电源标示LED。 n 请确认伺服驱动装置的‘POW’ LED。 n 请确认控制电源供应装置SR1的‘+15V’ LED。
<2个模块的LED都OFF时> (2) 请确认控制电源供应装置(SR1)的输出。 n 请从BD542分离CNBS电缆后确认LED。 n 请从Rack分离伺服基板后确认LED。
(3) 请检查控制电源供应装置(SR1)。 n 请确认输入到SR1的电压。 n 请替换SR1后确认LED。
<只有伺服驱动装置的‘POW’ LED被OFF时> (4) 请替换相关配件后确认电源标示LED。 n 请替换CNBS电缆后确认LED。 n 请替换伺服板后确认LED。 n 请替换伺服驱动装置后确认LED。 |
(1) 请确认电源标示LED。
驱动装置控制电压下降错误通过控制用+15V的下降在伺服驱动装置感知后通过CNBS1、2、3电缆在伺服板(BD542)进行处理。
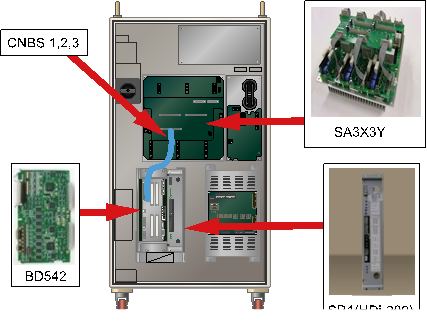
图 6.71 Hi5-N00控制器的驱动装置控制电压下降相关配件排列
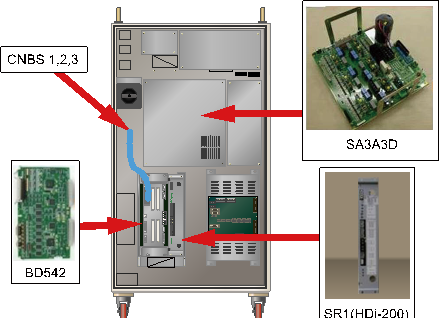
图 6.72 Hi5-N30控制器的驱动装置控制电压下降相关配件排列
n 检查伺服驱动装置的‘POW’ LED
请确认感知驱动装置控制电压错误的模块-中型用SA3X3Y和小型用SA3A3D的‘POW’。正常供应电源时该LED应时常ON(点灯)。
Ø 中型机器人用伺服驱动装置: SA3X3Y
Ø 小型机器人用伺服驱动装置: SA3A3D
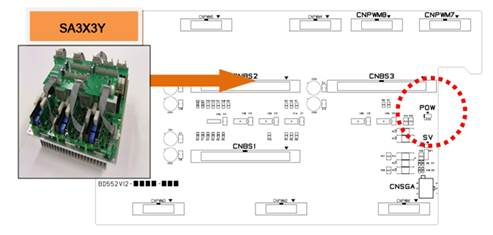
图6.73 SA3X3Y的‘POW’ LED相关配件排列
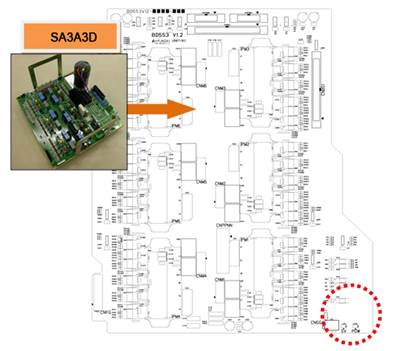
图 6.74 SA3A3D的‘POW’ LED相关配件排列
n SR1的‘+15V’ LED检查
伺服驱动装置的‘POW’ LED处于OFF状态、就请确认SR1的LED。请确认SR1和伺服驱动装置的LED是否同时OFF。
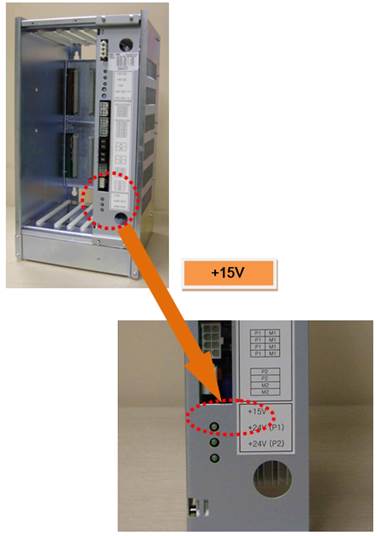
图6.75 SR1的‘+15V’ LED相关配件排列
(2) 请确认SR1的输出。
为了确认SR1的输出、分离连接与伺服驱动装置的配线和配件、并检查‘+15V’ LED。
n 分开CNBS电缆后检查LED
分开连接伺服驱动装置和伺服基板的CNBS1、CNBS2、CNBS3后确认SR1的.LED。分离电缆后SR1的‘+15V’ LED处于ON状态时是伺服驱动装置的不良。请把伺服驱动装置替换为正常品。
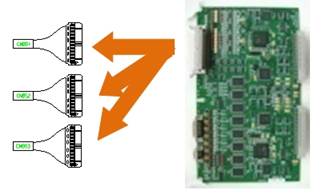
图 6.76 CNBS电缆的分离
n 分开伺服板(BD542)后检查LED
从Rack分开伺服基板后确认SR1的.LED。分开伺服基板后SR1的‘+15V’ LED处于ON状态就表示是伺服基板的不良。请把伺服基板替换为正常品。
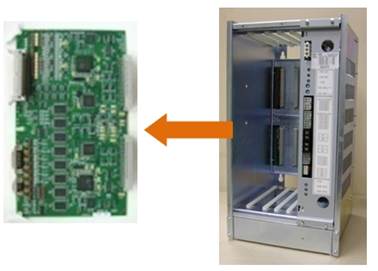
图 6.77 从Rack分开伺服板
(3) 请检查控制电源供应装置(SR1)。
控制电源供应装置接收AC 48V后在内部电路输出各基板所需的控制电源。
n SR1的输入电压检查
输入到SR1的电压超过规格时、控制用电源的输出可能会发生异常。输入电压超过允许范围时、请参考控制器输入电压检查步骤和控制器内部的单相电压检查步骤。
Ø SR1输入电压规格: 单相AC 48V
Ø 允许范围: 44V ~ 52V
n 替换SR1后确认LED
将SR1替换成正常品后请确认‘+15V’ LED。替换成正常品后LED ON就表示SR1不良。请替换成正常品后使用。
(4) 请替换相关配件后确认电源 LED。
请替换伺服驱动装置、伺服基板及CNBS电缆后确认伺服驱动装置的‘POW’ LED。
n 替换CNBS电缆后检查‘POW’ LED
请替换连接伺服驱动装置和伺服基板的CNBS1、CNBS2、CNBS3后确认伺服驱动装置的 ‘POW’ LED。替换电缆后‘POW’ LED ON时是电缆不良。请把CNBS电缆替换成正常品。
n 请替换伺服基板后检查‘POW’ LED
请替换伺服基板后确认伺服驱动装置的 ‘POW’ LED。替换伺服基板后‘POW’ LED ON时是伺服基板的不良。请把伺服基板替换为正常品。
n 替换伺服驱动装置后检查‘POW’ LED
请替换伺服驱动装置后确认伺服驱动装置的‘POW’ LED。替换电缆后‘POW’ LED ON时是伺服驱动装置的不良。请把伺服驱动装置替换成正常品。
Ø 中型机器人用伺服驱动装置: SA3X3Y
Ø 小型机器人用伺服驱动装置: SA3A3D