6.1.7.2. 原因及检查方法
6.1.7.2. 原因及检查方法
<马达Off状态下也发生时> (1) 请检查低电压错误感知相关配件。 n 请替换CNSGC电缆后检查。 n 请替换BD530/BD531板后检查。 n 请替换二极管模块后检查。
< 马达On瞬间发生时> (2) 请检查电源相关配件。 n 请替换二极管模块后检查。 n 请检查控制器内部3相电压。 n 请检查控制器输入3相电压。
<根据机器人的工作速度在特定步骤发生时> (3) 请变更机器人的工作速度并确认错误。 n 降低机器人的工作速度后确认错误。 n 机器人工作时检查控制器输入3相电压。 n 输入电压非为220V时、请检查内部3相电压。 |
(1) 请检查低电压错误感知相关配件。
AMP低电压错误是供应于伺服驱动装置的直流电源电压(P-N)未及设定值时在二极管模块感知。所发生的错误会通过CNSGC电缆在BD530/BD531板用软件进行处理。
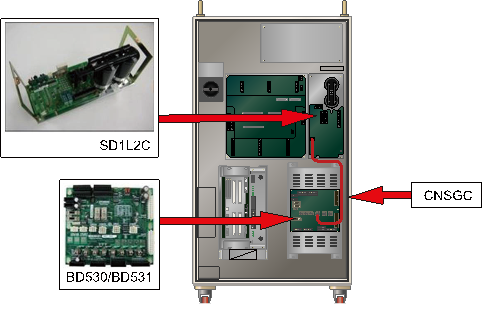
图 6.40 Hi5-N00控制器的低电压发生错误相关配件排列
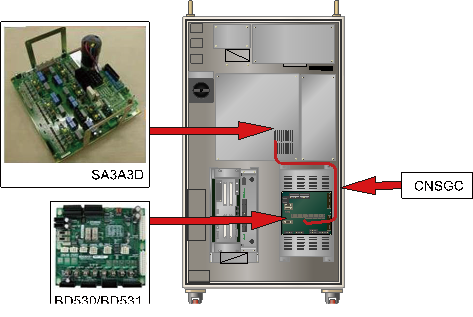
图 6.41 Hi5-N30控制器的低电压发生错误相关配件排列
n CNSGC电缆的替换检查
将CNSGC电缆替换成正常品后不发生错误、就是电缆的接触不良。请把CNSGC电缆替换成正常品后使用。
n BD530/BD531的替换检查
将BD530/BD531替换成正常品后不发生错误、就是该基板的错误。请把BD530/BD531替换成正常品后使用。

图6.42 BD530/BD531的替换
n 二极管模块的替换检查
感知AMP的低电压错误的模块是中型用SD1L2C和小型用SA3A3D。请确认现使用的控制器构件后检查。请替换成正常品后确认错误再度发生与否。
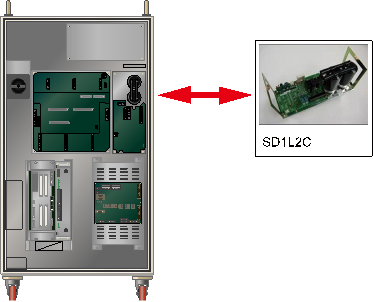
图 6.43 Hi5-N00控制器发生低电压时的SD1L2C替换
(2) 请检查电源相关配件。
AMP的低电压错误是输入到伺服驱动装置的3相AC 220V超过允许范围所致的。或因回生放电控制电路的异常、马达On时进行回生放电所致。
n 二极管模块的替换检查
替换感知AMP的低电压错误的模块中型用SD1L2C和小型用SA3A3D后确认错误再度发生与否。中型用控制器的二极管模块与伺服驱动装置分开、小型内藏于伺服驱动装置。
Ø 中型机器人用二极管模块: SD1L2C
Ø 小型机器人用伺服驱动装置: SA3A3D
n 3相电压检查
AMP的低电压错误大约在DC 210V(或148V)开始发生。AC 148V(或100V)以下的电压输入到伺服驱动装置的状态下启动马达、就可能会发生低电压错误。输入电压超过允许范围时请按照控制器输入3相电压检查步骤和控制器内部3相电压检查步骤检查电压。
Ø 伺服驱动装置输入电压规格: 3相AC 220V
Ø 马达 On时的允许范围: AC 198V ~ 242V
(3) 请根据机器人的工作速度检查错误发生与否。
AMP的低电压错误在输入电源容量不足或机器人急剧加速时会发生。请根据机器人的工作速度确认错误发生与否及输入到伺服驱动装置的3相电压变化。
n 机器人工作速度的变更
根据机器人动作的瞬间电力超过控制器设计规格、就可能会发生低电压错误。降低发生错误的步骤的速度后工作后确认错误发生与否。在速度低的状态下不发生错误、就请变更步骤速度后使用。
n 在错误发生步骤检查3相电压
AMP的低电压错误大约在DC 210V(或148V)开始。在发生错误的步骤中、3相电压以AC 148V (或100V)以下输入到伺服驱动装置时会发生低电压错误。输入电压超过允许范围时请按照控制器输入3相电压检查步骤和控制器内部3相电压检查步骤检查电压。
Ø 伺服驱动装置输入电压规格: 3相AC 220V
Ø 马达On时的允许范围: AC 198V ~ 242V