2.3. 编制Tip dressing及焊枪搜索程序
2.3. 编制Tip dressing及焊枪搜索程序
分别编制G1和G2所要执行的Tip dressing及焊枪搜索程序。Tip dressing及焊枪搜索功能有关的具体内容请参阅电焊功能说明书。
下面的程序是G1的Tip dressing及焊枪搜索程序例示、说明了机器人作业程序的运行和单独执行G1的Tip dressing及焊枪搜索程序所需的程序组成形态的特点。
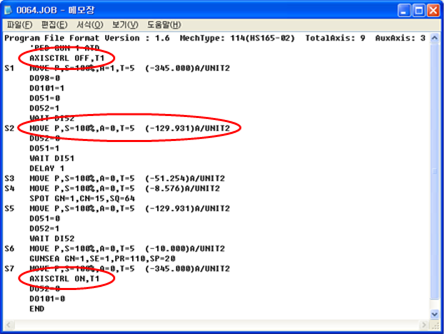
n AXISCTRL OFF、T1
把G1轴设为“附加轴控制无效”。在此状态下运行MOVE指令时可单独执行G1轴。
n MOVE command
MOVE指令以仅具备G1轴位置的Unit进行制作、方法是按[SHIFT]+[单位]键把Unit编号设置为2后点击[记录]键来记录MOVE指令。

n AXISCTRL ON、T1
把G1轴设为“附加轴控制无效”、在此状态下在运行机器人作业程序时可同时运行G1轴。