5.1. 变位机独立运行设置
5.1. 变位机独立运行设置
该功能利用几个变位机组成系统。一个变位机和机器人在执行作业时、支持变位机通过外部输入信号进行JOG动作。随之、需对外部输入信号编号进行设置。
(1) 选择『[F2]: 系统』→『4: 应用参数』→『6: 变位机独立运行』。
(2) 以此设置各变位机(站(Station))。
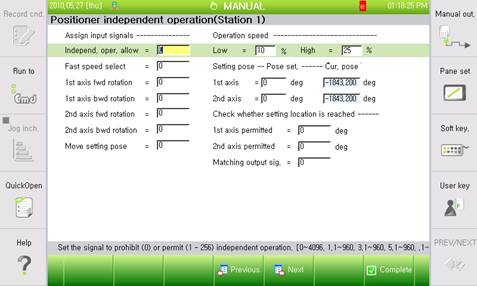
(3) 下表是有关信号设置的说明。
输出入信号 | 内容 | 备注 |
容许独立运行 | 独立运行禁止(0)/容许(1) | 容许压力设置完毕后才能进行独立运行 |
选择高速 | 选择速度(0=低 1=高) | 在运行速度范围内选择速度 选择运行速度: 最低速度% |
第一个轴前进旋转 | 变位机第一个轴前进(+)旋转 | 可同时运行1、2轴 |
第一个轴逆转 | 变位机第一个轴反方向(-)旋转 | 可同时运行1、2轴 |
第二个轴前进旋转 | 变位机第二个轴前进(+)旋转전 | 可同时运行1、2轴 |
第二个轴逆转 | 变位机第二个轴反方向(-)旋转 | 可同时运行1、2轴 |
设置移动位置 | 以设置位置为目标移动 | 移动到第1、2轴目标点、 但不能使用轴运行信号。 |
排列输出信号 | 第一、第二个轴达到设置位置范围时发出确认信号 | 分配信号输出[DO#信号] |
◆【注意】◆
① 已分配到输出入信号的信号不可复制成分配用信号。
② 为执行位置独立运行功能、首先要设置变位机组。
③ 同时使用附加轴MOVE独立执行功能(AXISCTRL)和变位机独立运行功能(SELSTN)有可能发生非正常故障。因此不可并用这两种功能。