5.4. 播放变位机独立运行
5.4. 播放变位机独立运行
如下独立运行变位机时、使用SELSTN时不能选择相应轴、不能通过作业程序运行。
播放时、变位机必须完成独立运行后进入下一Step、通过SELSTN S#和SELSTN ALL指令来变更站(Station)。可参考下列例示。
SELSTN S1、5.0、S12 → 完成1站(Station)独立运行后进行(待机5秒)
S1 MOVE L、S=300mm/s、A=0、T=0
S2 SMOV S1、L、S=100mm/s、A=0、T=0
S3 SMOV S1、L、S=100mm/s、A=0、T=0
S4 MOVE L、S=300mm/s、A=0、T=0
S5 SMOV S1、L、S=100mm/s、A=0、T=0
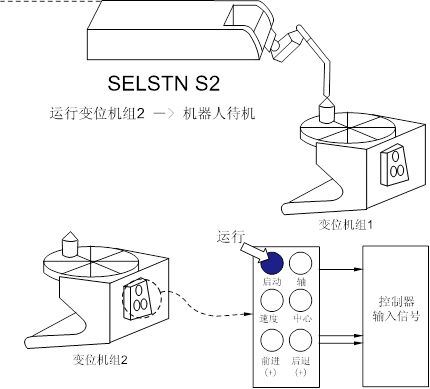
SELSTN S2、10.0、S12 → 完成2站(Station)独立运行后进行
S6 MOVE L、S=300mm/s、A=0、T=0
S7 SMOV S1、L、S=100mm/s、A=0、T=0
S8 MOVE L、S=300mm/s、A=0、T=0
S9 SMOV S1、L、S=100mm/s、A=0、T=0
SELSTN ALL → 完成3站(Station)独立运行后进行
S10 MOVE P、S=100%、A=0、T=0
S11 MOVE L、S=1200mm/s、A=0、T=0
S12 MOVE L、S=200mm/s、A=0、T=0
◆【注意】◆
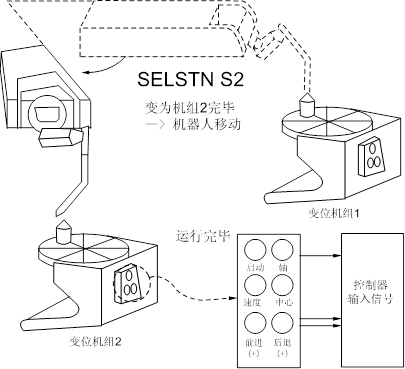
所选变位机的<允许>信号输入进来时、机器人在SELSTN位置进入等候状态。所选变位机的独立运行完成后机器人开始移动。
◆【注意】◆
① 运行程序时随着变位机组选择条件、机器人在待机状态一直等到独立运行信号变成<禁止>。这一动作是为用户的安全着想、考虑到独立运行信号在<允许>状态时的作业人员。
② Step、程序及外部重设的变更会取消变更站(Station)的选择(SELSTN ALL)、因此在重设时直到所有变位机的独立运行信号转变成<禁止>、机器人保持待机状态。
③ 运行如下功能时、无法进行变位机的独立运行。
- 无限(endless)Step的自动重设功能、执行无限(endless)重设。
- 共同控制时
- 变更焊枪时