2.1.1. 机器人形式及附加轴数设置
2.1.1. 机器人形式及附加轴数设置
(1) 请输入工程师代码(R314)。.
(2) 在手动模式中、选择『[F2]: 系统』→ 『5:复位』 → 『2: 机器人类型选择』。

图 2.1 机器人型号选择
(3) 在手动模式中选择『[F2]: 系统』→ 『5:复位』 → 『2: 机器人类型选择』后设置附加轴数。若输入使用的附加轴数、并按下『[F7]: 执行』键、在向导画面上即会显示出如下信息。

图2.2 附加轴数输入
(4) 若按下『是』键、即会显示出『确定要制作吗? [是]/[否]』信息。在[设置附加轴常数?]的提问下、按下 [ENTER]、并设置附加轴参数。

图2.3 进入附加轴参数设置菜单
(5) 在附加轴常数设置中设置轴规格及轴位置、减速比、软限制范围、AMP规格等。
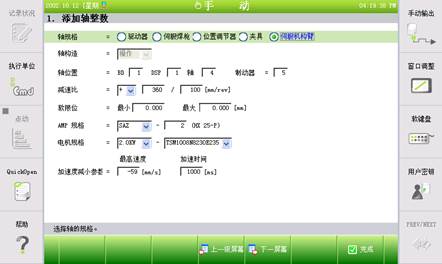
图 2.4 附加轴参数设置