2.1.2. 附加轴常数设置
2.1.2. 附加轴常数设置
(1) 在手动模式下选择『[F2]: 系统』→ 『5:复位』 → 『5: 附加轴整数』。

图2.5 附加轴常数设置菜单
※ 为了选择上述项目
n 在示教模式下输入Engineer code (R314)
n Motors off状态
n 有附加轴时
可进入画面。
(2) 设置附加轴机械常数。
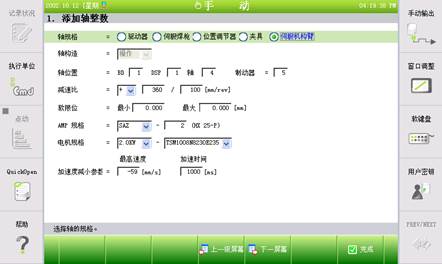
图 2.6 附加轴常数设置

l Hi5控制器可设置总共6轴的附加轴、但只能有一个轴设置为伺服机构臂轴。
 附加轴常数
附加轴常数
(1) 轴规格
在<驱动器、伺服焊枪、位置调节器、夹具、伺服机构臂>中选择附加轴类型。
决定附加轴规格时、应按逻辑附加轴顺序遵守[驱动器→ 伺服焊枪 → 位置调节器 → 夹具 → 伺服机构臂]顺序。
(2) 轴构成
选择轴的工作姿势和方向。
关于直线驱动器(行走轴)、前/后轴行走时选择<X>、左/右轴行走时选择<Y>、上/下轴行走时选择 <Z>。
驱动器没有置于与机器人坐标系相同的方向时、选择<任意>、并执行『驱动器校准』。
旋转驱动器也与直线驱动器相同、选择Rx/Ry/Rz或<任意>、并执行『驱动器校准』。
设置伺服焊枪时请参考『点焊焊接功能说明书』、使用位置调节器时参考『位置调节器同步功能说明书』。
(3) 轴位置
用户可指定附加轴的物理性结构。
BD =[1](1~2) => 指定BD542板的编号。 (2DSP/1Board)
DSP =[1](1~2) => 指定BD542板内的DSP编号。 (4Axis/1DSP)
Axis =[4](1~4) => 指定轴编号。
例) 设置7号附加轴时如果指定为1、1、4…
驱动器6轴 – 主轴3轴(1号BD542、1号DSP、1∼3轴)
手腕3轴(1号BD542、2号DSP、1∼3轴)
附加1轴(1号BD542、1号DSP、4号轴)
(4) 减速比
注册马达每旋转一圈时的轴移动量。
马达每旋转一圈时的直线行走轴移动距离按mm单位注册、马达每旋转一圈时的旋转轴旋转角度按 deg单位注册。关于符号、如果马达的正向(编码器增加方向)与轴工作方向一致、附加轴坐标值增加、就标“+”符号、相反、坐标值减少就标“-”符号。
请参考以下例示。
例 1) 如果是只使用1/100减速器的旋转轴…
马达旋转100圈时、轴旋转360deg、
因此、减速比 = + 360 / 100 [deg/rev]
例 2) 如果是使用1/20减速器和PCD 110mm的齿轮的直线行走轴…
马达旋转20圈时、移动距离为110xPhi(=3.14159)=345.5749[mm]
因此、减速比 = + 3455749 /200000 [mm/rev]
例 3) 如果是使用1/5减速器和Lead 5mm滚珠丝杠的直线行走轴…
马达旋转5圈时、轴移动距离为5mm、
因此、减速比 = + 5 / 5 [mm/rev]
(5) 软限制
设置机器人有效工作区域(附加轴软限制)。
如果把直线行走轴设置为[mm]、旋转轴设置为[deg]、就会把设置值反映到『[F2]: 系统』→ 『3:机器人参数』 → 『3: 软限位』。
(6) AMP规格
选择要使用于附加轴的AMP规格。
选择IPM符号、输入数字0-5设置霍尔传感器规格、选择AMP规格。AMP的型号规格如下。
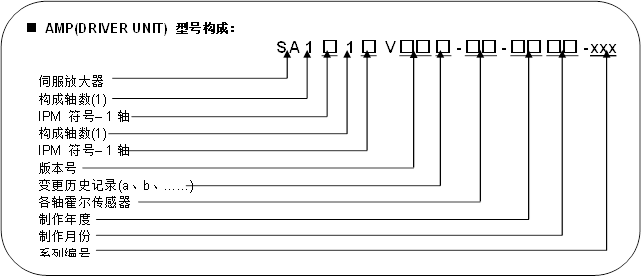
按照IPM符号和霍尔传感器符号将具备以下额定容量。
AMP Model | IPM 符号 | IPM额定电流 | Hall Sensor | Full Scale电流 |
大型 | L | 150Apeak | 0 | 140.62Apeak |
X | 100Apeak | 1 | 93.75Apeak | |
Y | 75Apeak | 2 | 46.87Apeak | |
Z | 50Apeak | 3 | 28.12Apeak | |
|
| 4 | 18.75Apeak | |
|
| 5 | 9.37Apeak | |
小型 | A | 30Apeak | 3 | 28.12Apeak |
D | 10Apeak | 4 | 18.75Apeak | |
|
| 5 | 9.37Apeak |
(7) 马达规格
选择使用于附加轴的马达规格。
先选择马达容量后、选择马达规格。
(8) 加减速参数
设置附加轴的最高速和加速时间。
在此设定的值与『[F2]: 系统』→ 『3:机器人参数』 → 『34: 加减速参数』的设置值相同适用。附加轴的最高速由用户指定、但根据马达的额定速度而受限制。
附加轴驱动中如果发生震动、就应调整加速时间。

l 同时设置底座轴、伺服机构臂轴时、请按照底座轴、伺服机构臂轴的顺序记录附加轴。
l 附加轴最多可以记录6轴。
l 伺服机构臂轴只可记录1轴。以下为设置附加轴的示例。
表2‑1 [例 1] 只设置伺服机构臂轴的情况
附加轴 | 轴规格 | 臂编号 |
第 1 轴 | 伺服机构臂 | 1 |
表2‑2 [例 2] 底座轴+伺服机构臂轴
附加轴 | 轴规格 | 臂编号 |
第 1 轴 | 底座 | - |
第 2 轴 | 伺服机构臂 | 1 |
l 不支持多功能伺服机构臂。
l 若附加轴及伺服参数设置完成、请确认重新投入控制器的主电源后是否发生编码器相关错误。此时、若发生错误、请参考『控制器维护说明书』。
l 伺服机构臂上未发生错误、处于正常状态时执行编码器修正。
编码器修正完成后、在供应(马达ON)电源并持续运转附加轴的同时、确认Bit常数是否正确。
Bit常数的确认、 与伺服机构臂移动的距离和监测功能的轴数据中显示的伺服机构臂的数据进行比较、确认是否一致。
l 手动速度及自动运行时、若发生振动及颤动、需要对器具的装配状态进行检查及调谐(加减速、增益)。