3.2. 伺服机构臂的Jog动作
3.2. 伺服机构臂的Jog动作
在示教模式中为了执行伺服机构臂的Jog动作、在『系统』 → 『5: 复位』 → 『6: 机构设置』画面中设置附加轴的机构。

图 3.4 机构设置
若按下示教模式的[Unit/机构]键、示教模式上端会显示机构编号和轴编号。
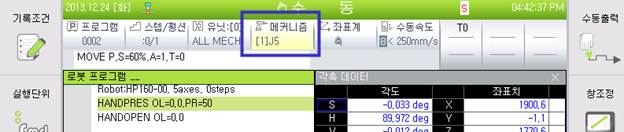
图 3.5 机构(伺服机构臂轴)Jog可行状态
若按照轴的顺序按下[X-]、[X+]键、即可完成伺服机构臂轴的手动操作。设置的机构上只有Jog键按照附加轴的顺序动作、所以机器人不能进行Jog动作。伺服机构臂轴的Jog动作与坐标系无关、进行同一动作。Jog动作速度限定为附加轴的最高速250mm/sec。