3.2. 使用环境设置
3.2. 使用环境设置
设置与点焊有关的使用环境,进行适合该环境的动作。
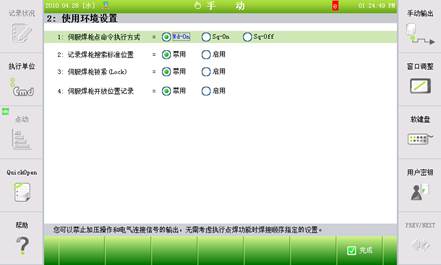
(1) 伺服焊枪点焊指令执行方式
执行SPOT指令时,如果该焊枪为伺服焊枪,就与焊接顺序设置无关,可禁止执行加压动作及焊接信号输出。此功能在确认示教位置时有用。根据设置状态执行点焊的顺序如下。
输出方式 | 内容 |
Wd-On | 执行在点焊功能指定的所有焊接顺序。 Clearance位置→ 加压 → 检测加压一致 → 焊接完成等待→Clearance 位置 |
Sq-On | 除了通电信号,执行焊接顺序。 在保持加压的状态下进行WI等待,可以确认加压位置。 Clearance位置 → 加压 → 检测加压一致 → Clearance位置 |
Sq-Off | 不进行加压动作、通电信号输出、WI等待等。 Clearance位置 |
(2) 记录焊枪搜索标准位置
由控制器管理喷嘴的磨损量的焊枪形式(伺服焊枪, EQless焊枪)时, 为了算出磨损量而需决定标准位置,以此为准算出实际磨损量。
n Off :
基于决定的基准位置,算出磨损的实际磨损量。
n On :
决定计算磨损量所需的基准位置, 在安装新喷嘴的状态下,起初执行一次即可。
(3) 伺服焊枪锁定
关于第一个伺服焊枪,设置再现时是否锁定伺服焊枪。
(4) 伺服焊枪开放位置记录
n 禁用 :
一般记录伺服焊枪的焊接点的方式,进行手动加压动作后记录现位置。
n 启用 :
此手动加压动作不便时,只在固定电极相接基板的位置记录现在位置,应在焊接条件设置基板厚度。