4.3.2. 移位缓冲器
4.3.2. 移位缓冲器
移位缓冲器用来在移位缓冲器里在输入移位量、并当在线移位『SONL』功能执行了移位时来表示其值。
(1) 选择『[F1]:服务』 → 『2:寄存器』 → 『2:移位缓冲器』。
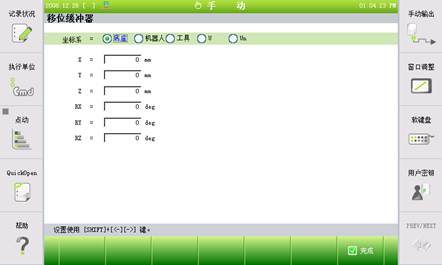
(2) 设置移位标准坐标。选项有机器人、工具和基础坐标
(3) 输入移位数据并按[ENTER]。要存储更改的设置、按『[F7]:完成』。如果按了[ESC]、更改的数据将不被存储。

l 水平移动移位(“Rx=Ry=Rz=0”时)
如下所示、水平移动移位是当A、B、C、D点和a、b、c、d点平行时使用的。

图4.8 水平移动移位
l 角度修正移位(至少Rx、Ry、Rz中的一个不为0时)
通常、工件不是平行放置的。工件可以通过修正其位置和姿势的方法来移位。用户应该提前计算工件A和a之间的位置与姿势的关系。
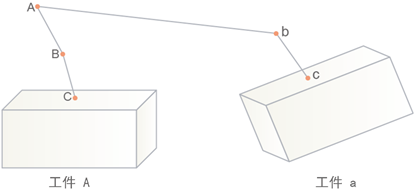
图4.9 角度修正移位