2.1.1. 连接紧急停止装置
2.1.1. 连接紧急停止装置
在协作动中紧急停止时,因系统以通信方式监测彼此状态而使其他机器人也停止,但硬件信号优先于此,从而会造成协作机器人之间的位置发生偏移。为了最大限度地减少急停时协作位置的偏移程度(错位),请连接控制器的外部紧急停止装置。
Hi5a控制器配有用户专用外部紧急停止装置, 连接详情请参考下图。
使用机器人协作功能时,应另行安装紧急停止开关,以保障急停信号同时输入到不同的控制器。请将供用户使用的紧急停止连接线结合,如下图所示,作为一个紧急停止系统使用, 以尽量减少协作位置因急停而被偏移的程度。
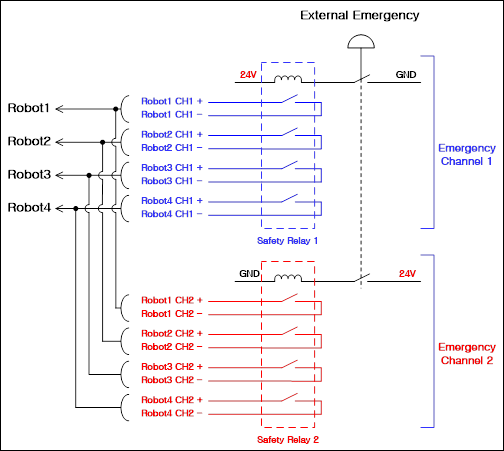
图 2.1 机器人协作用急停连接线

l 在协作运动中紧急停止时,可能造成相对协作位置偏移(错位)。
l 在搬运(handling)功能模式下,为了减少在协作运动中出现的协作错位(如急停时出现的误差、同步误差、校准误差、轨迹误差等),应安装浮动(floating)机构。
l 在搬运功能模式下,如有两台协作机器人,建议至少1台以上的浮动机构。
l 使用外部紧急停止装置时,请尽量使用安全继电器(Safety Relay)。
例)Omron公司,G7S-4A2B