3.2.1. 操作键(key)来切换模式
3.2.1. 操作键(key)来切换模式
在手动模式下,按如下方法可切换协作控制的运动模式。
① 使用功能键;
② 使用R CODE;
③ 使用快捷键“SHIFT+6”, 按独立、主机、从机、CMOV记录的顺序切换。
操作详情如下表所示:
表 3‑1 操作键(key)来切换功能
操作键 | 功能切换 |
功能键(自定义键) | 手动独立模式(Indiv) ↔手动协作模式(MASTER/SLAVE) |
SHIFT + 功能键 | 仅限于SLAVE(从机) SLAVE手动协作模式 ↔ CMOV记录模式 |
R351,0 | 手动独立模式 |
R351,1 | 手动协作模式,指定主机 |
R351,2 | 手动协作模式,指定从机 |
R351,3 | CMOVE记录模式,指定从机点动(jog)模式 只有上一步状态为“指定从机”时才能切换到该模式 |
n 手动模式独立(INDIVIDUAL)状态
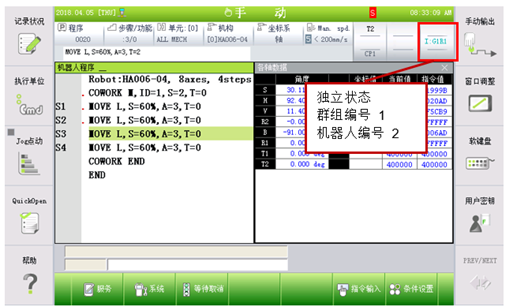
图 3.3 手动模式独立(Individual)状态界面
可以通过点动(jog)方式独立操作个别机器人。
n 手动模式协作(指定主机)状态
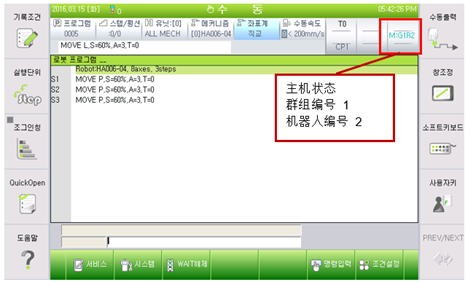
图 3.4 手动模式协作主机状态界面
在从机已被指定的状态下,可以沿着主机运动进行点动操作。
n 手动模式协作(指定从机)状态
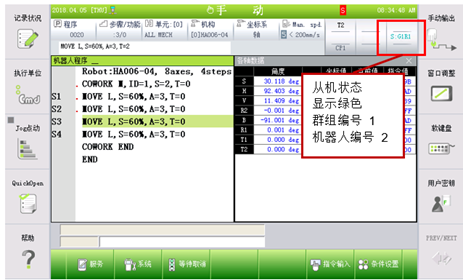
图 3.5 手动模式协作从机状态界面
已设置为跟随主机运动而运动的从机状态。
n CMOV记录模式,从机电动模式状态
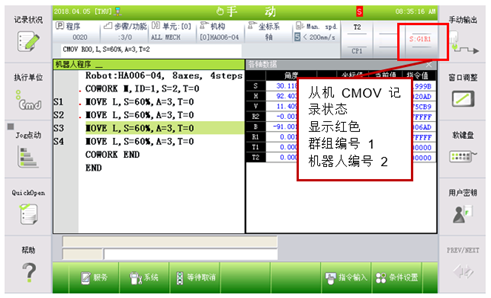
图 3.6 CMOV记录模式状态界面
通过CMOV记录或CMOV指令的步骤前进/退后,不仅能确认示教位置,也能以主机器人末端执行机构(end-effector)坐标系为准点动操作从机。但要记录步骤或使机器人运动时,就必须在作对象机器人中有已设置为主机的机器人。

l 在尚未设置共同坐标系的状态下,无法在手动模式独立状态下将协作作用转换为主机或从机。
l 对于由R CODE转换手动协作模式,R351,3“CMOV记录状态”只有在“手动协作状态(从机指定模式)”(R351,2)下才能执行。
l 若要利用已被分配的功能键(F key)转换为“CMOV记录模式状态”,首先需要将机器人角色更改为从机模式后,在此状态下利用SHIFT+F键即可。