4.3. CMOV指令
4.3. CMOV指令
CMOV {参数1},{参数2},{参数3},{参数4},{参数5} | |
参数1 | 主机器人系统的机械手标识符 形式:R(#1)(#2) #1 : 主机器人系统编号 (1~4) #2 : 机器人系统的主机机械手标识符 (0: Robot, 1: Positioner Group 1, 2: Positioner Group 2) |
参数2 | 插值类型(interpolation) 指定从机器人之间的插值方式,仅限于直线与圆弧。 (L: Linear, C: Circular) |
参数3 | 插值速度(Speed) 指定相对于工件的速度 |
参数4 | Accuracy (0~7) |
参数5 | 工具(Tool)编号(0~31) |
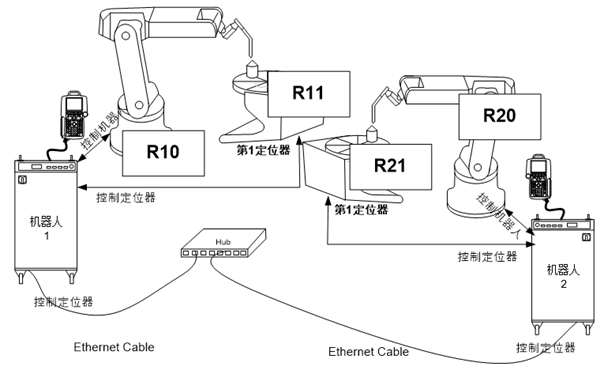
图 4.3 ID标识符区分方法