4.2. 示教并编写协作搬运用(handling)程序
4.2. 示教并编写协作搬运用(handling)程序
(1) 操作员人数与协作控制台数应保持1:1比例。因此,参与工作的操作员人数与将要协作的机器人台数相同。但利用TP路由器时,可由1名操作员同时操作所有机器人。
(2) 请确认是否设置好协作机器人之间的共同坐标系。然后,将手动协作控制的模式切换功能分配到功能键(F key)。
(3) 将主机器人与从机器人分别移动至协作开始位置,并将基准位置作为开始位置记录。

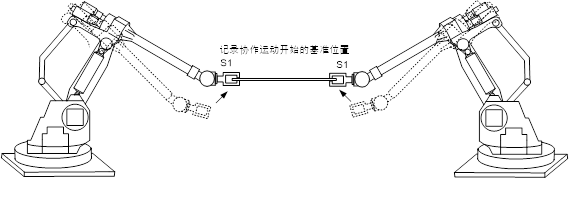
图 4.1 记录协作运动开始的基准位置
(4) 通过利用已分配到F键的功能键来将主机器人与从机器人设置为协作状态(Cooperation Status)。同时,还可以通过输入R351代码来指定机器人角色。
(5) 注册协作控制的开始指令(COWORK M/S)。COWORK指令用于指定MASTER/SLAVE,也指定SLAVE/MASTER编号。此时,主机器人只能在同一群组内设置1台,从机器人则最多可指定3台。

(6) 以点动(JOG)方式操作主机器人。此时,从机以主机工具末端位置为相对位置跟随。在协作点动状态下,从机也应按住“Enable”开关。在记录位置上,只在主机上记录步骤。在从机器人控制器上则不记录。
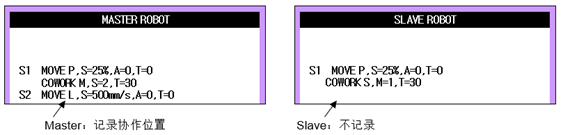
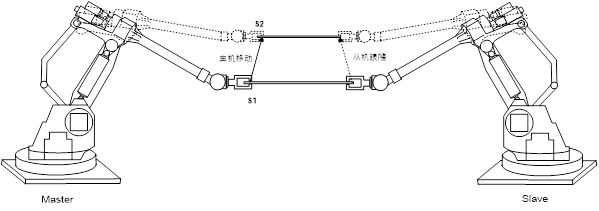
图 4.2 操作主机器人
(7) 将协作运动步骤记录在主机上。设置主机的插值类型及速度。在协作运动函数中使用一般的MOVE指令。(SMOV无法使用)
(8) 协作运动结束后,将结束协作控制(COWORK END)的指令插入到主机与从机中。


l 在手动协作运动中,请勿将从机的“Enable”开关状态改为“OFF”。硬件信号优先于通信信号,从而会造成协作机器人之间发生错位。严重时甚至会造成工件或机械手损坏。