4.5. 确认CMOV记录位置
4.5. 确认CMOV记录位置
CMOV步骤作为一种有效功能,通过在CMOV记录模式下利用步骤前进/后退功能,可确认示教位置。CMOV步骤记录以“主机末端”(Master end)执行机构坐标系为准的位姿,因此,应先确认主机的工具位置后执行。
(1) 对于被示教为主机(COWORK M))的机器人,将手动协作状态设置为主机状态。(R351,1)
(2) 对于被示教为从机(COWORK S)的机器人,设置为CMOV记录状态。(R351,3)
(3) 将主机器人移动至将要协作的步骤位置后,使其处于停止状态。
(4) 从机选择所要移动的CMOV步骤后按下“步骤前进”键,将会移动至记录于主机末端执行机构上的位置。例如,如下图所示,若CMOV记录位置记录于主机末端执行机构坐标系上的原点(0,0,0),无论主机器人位置如何,从机器人将会在执行CMOV时移动到主机末端执行机构的原点位置。
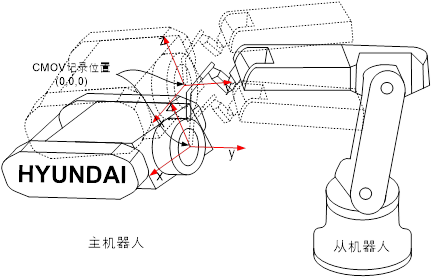
图 4.6 确认CMOV记录位置

l 在CMOV记录状态(R351,3状态)下,无论COWORK指令是否执行,就将会移动至有关步骤位置。
l 在CMOV记录状态下,无法点动操作主机。
l 在CMOV记录状态下,不会进行实时协作运动,因此,请勿对主机同时进行步骤前进/后退操作,而使其处于停止状态。
l 在CMOV记录状态下,更改主机位置并使其停止后,再对CMOV步骤进行步骤前进操作,就会移动至经更改后的位置。