4.2. 解除 STO 功能
4.2. 解除 STO 功能
如果机器人超出安全参数,SafeSpace就会触发 STO,然后机器人停止运动。操作人员应检查机器人和安全参数。然后,操作人应解除 STO功能,将机器人移动至安全区。
在 SafeSpace 监控菜单中,可以监控机器人是否超出配置空间。此外也可以解除因超限造成的 STO,然后在手动模式下将机器人移至安全区。此种状态将实时更新。
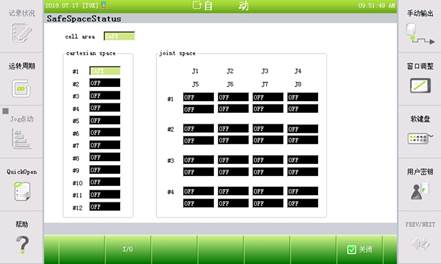
图 4.8 SafeSpace 状态
触发 STO 时,示教箱上会出现错误消息,详情参见 SafeSpace 监控菜单的 I/O 页。用户可以查看 STO 原因,对机器人进行维修。
I/O 页显示了输入/输出信号的状态和分配。

图 4.9 SafeSpace I/O