4.1.7. 工具
4.1.7. 工具
工具最多可以配置 16 个球体空间,建模时采用多个球体。各工具模型最多含有 6 个球体。工具模型用于监控单元区域和笛卡尔空间。TCP 通过 TCP 速度限制进行监控。通过安全 I/O 信号只能启用一个工具。
TCP 位置应根据机器人法兰坐标系(图 3-7 中的 Xf、Yf、Zf)进行配置。各工具的 TCP 位置应与机器人控制器的工具数据一致,这是因为机器人监控功能会检查SafeSpace 的工具编号和 TCP 位置与机器人控制器是否一致。
工具建模球体包括球心和半径。球心应根据机器人法兰坐标系进行设置。这些参数与机器人控制器设置的工具数据无关。半径必须足够大,以覆盖当前工具尺寸以及最大 TCP 速度下的停止距离。
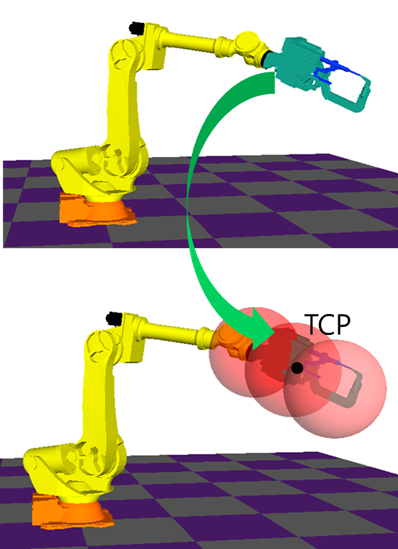
图 4.6 工具建模
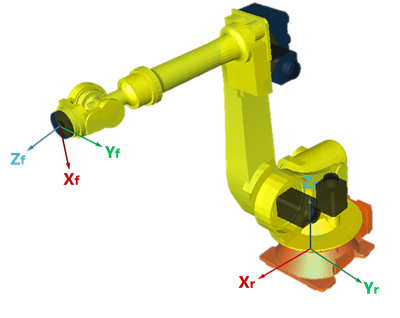
图 4.7 机器人法兰坐标系
表 4‑7 工具参数
工具参数:工具 1~16 | |||
参数名称 | 数值 | 说明 | |
名称 | 名称字符串 | 最多 24 个字符 默认设置=“关节空间 n” ※ 仅用于 HRSafeSpace。名称未从机器人控制器传输至 SafeSpace。 | |
TCP | X | -10,000~ 10,000(mm) | TCP 的 XYZ 坐标值 默认设置:0 |
Y | |||
Z | |||
属性:球体 1~6 | |||
开/关 | 开/关 | 关=不监控此球体 开=监控此球体 默认设置:开(球体 1),关(球体 2~6) | |
球心 | X | -10,000~ 10,000(mm) | 法兰坐标系中球心的 XYZ 坐标值。 默认设置:0 |
Y | |||
Z | |||
半径 | 0~10,000 (mm) | 球体半径 默认设置:1,000(mm) | |