8. HRSafeSpace -练习
假设我们已经设计如下所示的机器人点焊单元布局:
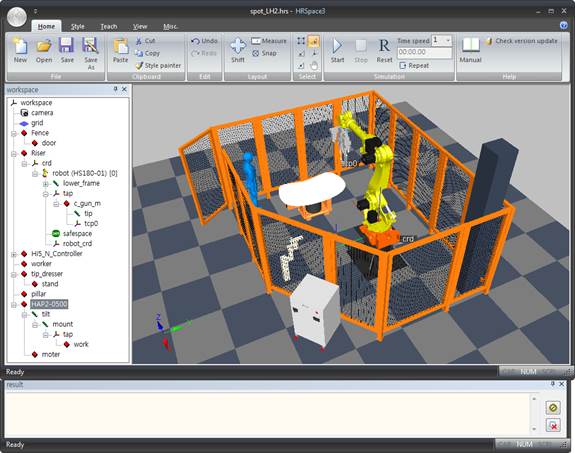
图 8.1 机器人点焊单元示例
这是立杆上的一个 HS180-01 操作手。在机器人法兰上安装一个 C 型点焊枪,然后将机器人安装在一个高度为 800mm 的立杆上。在每个工作周期之初,由工人在机器人前方的定位器上安装一个焊接工件。整个单元周围是五面体围栏。由于天花板上设有管道,因此假设机器人在 Z 轴上的运动范围限为 0-3400mm,围栏内设有一根支柱。
我们可以借助于 HRSpace 可视化功能配置 SafeSpace 参数,然后将生成的 ROBOT.SFS 文件下载至实际使用的 Hi5a 机器人控制器。