2.3. Step 1.基本设置
2.3. Step 1.基本设置
完成事先检查后可进行基本设置。基本设置是指定伺服焊枪的移动电极的基准位置,移动到相应的位置施加加压力时必须要设置的过程。
如下图所示,基本设置由4个项目组成。
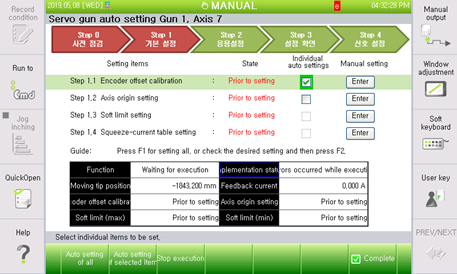
(1) 编码器选项补偿
- 通常,因伺服焊枪马达的更换等造成编码器数据出现变更时,在机构性的可对齐相同位置的地方设置编码器的原点。伺服焊枪是移动电极在机构性的最大开放状态时进行设置。
- 手动设置请参考“手动设置”的“编码器选项补偿”。
(2) 轴原点设置
- 通常,伺服焊枪轴原点的设置是在移动电极和固定电极都装上新Tip的状态下进行,在两个电极相遇的位置进行设置。伺服焊枪大部分动作以此轴原点为准进行,因此非常重要。
- 手动设置请参考“手动设置”的“轴原点设置”。
(3) 软限制设置
- 通常,伺服焊枪的软限制是在移动电极的最大开放状态下在“最小”项目进行设置,在去掉全部Tip的最靠近的位置设置“最大”项目。
- 手动设置请参考“手动设置”的“软限制设置”。
(4) 加压力-电流表设置
- 为了令安装到机器人上的各种伺服焊枪以所需的加压力进行加压,应进行伺服焊枪上投入的电流和发生的加压力能匹配起来的作业。为此,本公司提供伺服焊枪加压力-电流表,这个表应根据伺服焊枪进行调试。
- 如要使用该功能,应在拟要使用的加压力领域中选择5个代表值。伺服焊枪加压力-电流表的调试是找出与这5个加压力代表值一致的电流的过程。这个表有可能因伺服焊枪的姿势而相异,因此,重力方向和反重力方向的移动电极方向都要进行调试,才能在伺服焊枪的各种姿势下进行高准确度的加压。
- 具体请参考“伺服焊枪加压力-电流表调试”。
基本设置包括自动设置和手动设置。
(1) 自动设置:伺服焊枪自动移动到指定位置后执行指定的设置。
- 可进行自动设置的项目
n 编码器选项补偿
n 轴原点设置
n 软限制设置
- 加压力-电流表的设置需要安装加压力计等用户介入作业,无法自动执行。
(2) 手动设置:由用户操作将伺服焊枪移动到指定位置,在专用设置画面执行指定的功能。