2.3.1. 自动设置
2.3.1. 自动设置
点击『[F1]: 全部自动设置』来进行伺服焊枪“基本设置”的自动设置。“全部自动设置”时因为伺服焊枪的移动电极会自动移动,因此要满足下面的条件。
- 给移动电极和固定电极安装新Tip
- 伺服焊枪周围不能有作业人员
- 移动电极和固定电极之间不能有作业物
- 手动模式
- 开启马达
- 禁止移动电极最大开放(与最大开放位置保持一定距离)
“全部自动设置”自动执行如下程序。
(1) 编码器选项补偿
- 移动电极移动到最大开放位置。
- 在最大开放位置停止后进行编码器选项的补偿。
(2) 轴原点设置
- 伺服焊枪进行3次加压,2次开放动作。
- 3次加压后移动到两个电极相遇的位置。
- 由用户确认相应位置。
- 进行轴原点的设置。
(3) 软限制设置
- 设置轴原点后自动进行。
(4) 加压力-电流表设置
- 自动转到设置菜单。
伺服焊枪基本设置的自动设置是,自动识别伺服焊枪的“编码器选项补偿”位置和“轴原点补偿”位置,在相关位置进行“编码器选项补偿”、“轴原点补偿”和“软限制设置”。基本设置的自动设置不会自动进行“加压力-电流表设置”,请参考“伺服焊枪加压力-电流表调试”章节进行设置。
“全部自动设置”时,移动到轴原点位置后,如下所示会让用户确认轴原点位置。这时,确认移动电极的位置和反馈电流(1A以下)后如在相连的位置,点击“是”继续进行设置。如反馈电流高或移动电极和固定电极处于未相连的状态,则用Jog键进行细微调整后点击“是”。如不需要自动设置,请点击“否”退出设置。
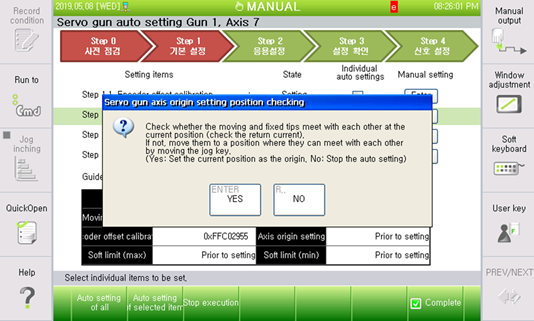
图 2.5 用户确认轴原点位置
注意)在伺服焊枪最大开放位置上有缓冲器等非金属材质的挡块时,在估算最大开放位置时会存在难度,因此建议除掉后进行设置。
伺服焊枪基本设置的画面构成和功能如下。
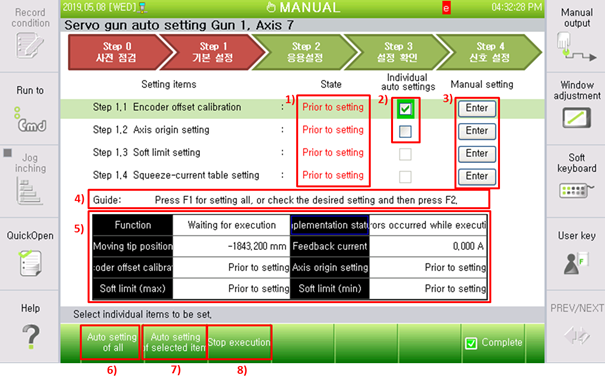
1) 状态:当前伺服焊枪的设置状态(设置前、完毕、已变更中的一个)7
2) 个别自动设置:支持不是全选,仅对勾选项进行自动设置的功能。点击『[F2]: 自动设置选项』即可自动执行勾选项的设置。
3) 手动设置:移动到设置相关项目的画面。
- 编码器选项补偿
自动移动到『[F2]: 系统』 → 『3: 机器人参数』 → 『4: 编码器选项』画面。
- 设置轴原点
自动移动到『[F2]: 系统』 → 『3: 机器人参数』 → 『2: 轴原点』画面。
- 设置软限制
自动移动到『[F2]: 系统』 → 『3: 机器人参数』 → 『3: 软限制』画面。
- 设置加压力-电流表
自动移动到『[F2]: 系统』 → 『4: 应用参数』 → 『1: 点焊』 → 『7: 伺服焊枪加压力调试』画面。
4) 指南:显示当前的设置状态或发生错误的原因及对策方案。
5) 监视:显示当前设置的情况及伺服焊枪的位置和反馈电流、设置值等。
6) 全部自动设置:全部自动设置的执行命令。
7) 自动设置选项:仅对指定为自动设置的个别项目进行自动设置。
8) 停止执行:停止正在进行的设置。