4.11. SWD文件修复功能
4.11. SWD文件修复功能
与点焊应用相关的设置会保存到控制器的ROBOT.SWD文件上。为了与其他机器人共享焊接条件和顺序等而复制使用ROBOT.SWD文件时,不仅是焊接条件和顺序,其他设置等也会出现变动,有可能出现焊枪搜索基准位置、焊枪搜索状态、加压力的变更等问题。



为了预防上述问题,因复制ROBOT.SWD文件而出现焊枪搜索基准位置、加压力-电流表等主要参数的变更时,如执行SPOT及GUNSEA命令就会发出警告。
注意)为了还原控制器初始化设置而复制文件时,应设置如上检查的例外情况。复制『[F2]: 系统』 → 『4: 应用参数』 → 『1: 点焊』 → 『2: 使用环境设置』的SWD文件时,如把变更检查设为无效,即不会进行上述检查。
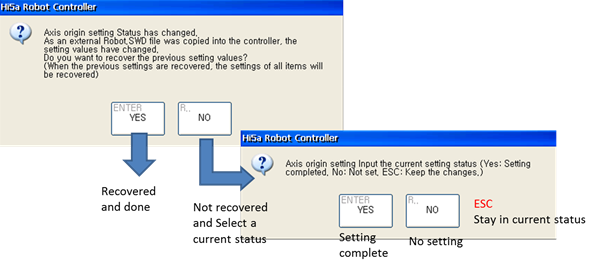
SWD文件的还原功能是因复制如上ROBOT.SWD文件而出现主要参数的变更时,限最初的1次进行还原的功能。
可打开『[F2]: 系统』 → 『4: 应用参数』 → 『1: 点焊』 →『8: 还原SWD文件』菜单执行该功能。如果当前选择的焊枪编号的主要参数已经出现变更,就会执行SWD文件的还原过程。还原时点是因复制文件出现变更之前的状态。如重复执行,会丢失保存的之前状态数据而无法进行还原,请多加注意。
该功能也可用R code执行,为了执行R code,需要工程师以上的权限。
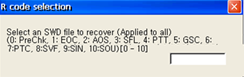
n [R]+[367]:还原所有焊枪的指定的设置
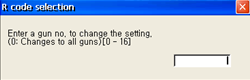
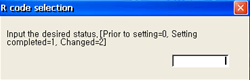
n [R]+[366]:变更指定焊枪的设置状态。不能还原,只能消除警告。可输入焊枪编号后依次输入所需的设置和状态。

n 设置编号
0 PreChk:事先检查
1 EOC:编码器选项补偿
2 AOS:轴原点设置
3 SFL:软限制设置
4 PTT:加压力-电流表调试
5 GSC:焊枪搜索
6 GBC:焊枪臂弯量设置
7 PTC:板厚补偿
8 SVF:伺服焊枪设置确认
9 SIN:输入信号设置
10 SOU:输出信号设置