2.5.3.2. 基础记录坐标或机器人记录坐标
2.5.3.2. 基础记录坐标或机器人记录坐标
根据所在坐标、机器人的位置和姿势可能会有不同。通常而言、如果没有驱动轴、基坐标和机器人坐标是一样的。但是在定义了驱动轴后、机器人工具的位置和姿势在基座标和在机器人坐标下并不相同。
要进行检查、可在手动模式下依次选择『[F2]:系统』 → 『1:用户环境』 → 『1:姿势记录式样=<底座> or <机器人>』、从所记录的MOVE命令中、按下[Quick Open]键。

l 若要更改姿势记录格式、请咨询工程师。
l 由于机械特性的原因、一个工具末端位置/方向将有多个姿势、因此必须指定机器人类型以定义一个唯一的姿势。
机器人形态保存为[姿势参数]、CFG(P1、CFG、LP1、CFG)、CFG的各个bit分配如下。
bit0: (0:指定的、1:未指定)
确定是否将为机器人当前的姿势指定配置式样。(如不指定、将会自动决定。)
bit1: (0:前面、1:背面)
如果机器人的工具末端在机器人坐标X轴的+方向、则选择前侧、如果在 - 方向、则选择后侧。
bit2: (0:向上、1:向下)
这是H轴和V轴之间的关系。
 .
.
图 2.40 H轴和V轴的姿势:上(左)、下(右)
bit3:(0:翻转、1:非翻转)
决定B轴的坐标为‘+’值——Filp、还是为‘-’值——non-flip。 图片中的红色箭头表示腕轴的上部方向。
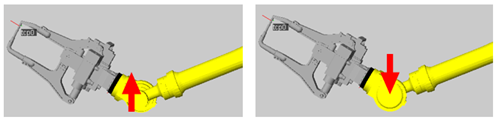
图 2.41 Flip(左)/Non-flip(右)姿势
bit 4:(0:|S|<180,1:|S|>=180)
选择 S 轴的角度为何。
bit 5:(0:|R2|<180,1:|R2|>=180)
选择 R2 轴的角度为何。
bit 6:(0: |R1|<180,1:|R1|>=180)
选择 R1 轴的角度为何。
bit 7~9:代表坐标系。
(0:基,1:机器人,2:角,3:编码器,4:用户、6:主工具末端)
bit 10~13:用户坐标系编号。(1~10)
bit 14: Reserved
未使用领域,此后可能会在不经预告的情况下被改变。
bit 15: (0: |B|<180, 1:|B|>=180)
选择B轴角度位于何处。(仅在是B轴动作范围为180˚以上的机型的情况下有意义。)
l 最后、为了方便用户、坐标系的指示由其它符号隔开、如下所示:
基础坐标系 = (X,Y,Z,Rx,Ry,Rz,cfg)
机器人坐标系 = (X,Y,Z,Rx,Ry,Rz,cfg)R
轴坐标系 = (S,H,V,R2,B,R1)A
编码器 = (S,H,V,R2,B,R1)E
用户坐标系 = (X,Y,Z,Rx,Ry,Rz,cfg)U è非定义方法编号
用户坐标系 = (X,Y,Z,Rx,Ry,Rz,cfg)Un è定义方法编号(1~10)