3.6. 手腕轴负荷允许值
3.6. 手腕轴负荷允许值
粘贴于机器人手腕轴前端的负荷根据允许重量、允许负荷扭矩、允许惯性矩而定。
 允许架板重量 :
允许架板重量 :
表 3‑2 允许架板重量
机器人型号 | 允许架板重量 |
HA006 | 58.8 N (6kgf) 以内 |
HA020W | 196 N (20kgf) 以内 |
HA010LW | 98 N (10kgf) 以内 |
 允许负荷扭矩
允许负荷扭矩
表3‑3 允许负荷扭矩
机器人型号 | 允许负荷扭矩 | ||
R2轴旋转 | B轴旋转 | R1轴旋转 | |
HA006 | 11.8 N·m (1.2 kgf·m) 以内 | 5.9 N·m (0.6 kgf·m) 以内 | |
HA020W | 39.2 N·m (4 kgf·m) 以内 | 19.6 N·m (2 kgf·m) 以内 | |
HA010LW | 24.5 N·m (2.5 kgf·m) 以内 | 10.5 N·m (1.1 kgf·m) 以内 | |
 允许惯性矩
允许惯性矩
表 3‑4 允许惯性矩
机器人型号 | 允许惯性计算例 | ||
R2轴旋转 | B轴旋转 | R1轴旋转 | |
HA006 | 0.17 kg·m2 (0.017kgf·m·s2) | 0.06kg·m2 (0.006kgf·m·s2) | |
HA020W | 0.75 kg·m2 (0.075kgf·m·s2) | 0.25kg·m2 (0.025kgf·m·s2) | |
HA010LW | 0.64 kg·m2 (0.064kgf·m·s2) | 0.15kg·m2 (0.015kgf·m·s2) | |
请参考[3-2]~[3-4],使用时负荷不能超过允许条件。
[图3.9]~[3.10]所显示的是假设贴附的负荷在于质点时其质点所处的区域范围。但,几乎不会出现实际负荷(End Effector)处于质点的情况,因此,通过求算各轴的惯性矩来进行评估。假设贴附的负荷在于质点时,
(例)机器人型号为【 HA006 】,所贴附的负荷重量为40Kg时
n R1轴中心的允许惯性矩
① 从允许扭矩看时的允许中心位置
LR1 ≤ (允许扭矩) / (负荷重量)
LR1 = 88.3 N·m / (40Kg×9.8 m/s2) = 0.225 m
② 从允许惯性矩看时的允许中心位置
LR1 ≤ (允许惯性矩/负荷重量 )1/2
= (1.62 kg·m2 / 40 kg )1/2 = 0.201 m( < 0.225 m)
综上所述,R1轴中心的距离根据允许惯性矩而受限制,其值为0.201 m以内。
n B 轴中心的允许中心位置
(该机器人的B轴中心位于同一轴上,并且,允许负荷扭矩、允许惯性矩的B轴、R2轴值相同。 因此,如果满足B轴的允许条件,就能满足R2轴的允许条件。)
① 从允许扭矩看时的允许中心位置
LB ≤ (允许扭矩) / (负荷重量)
LB = 176.5 N·m / (40Kg×9.8 m/s2) = 0.450 m
② 从允许惯性矩看时的允许中心位置
LB ≤ (允许惯性矩 /负荷重量 )1/2
= (6.48 kg·m2 / 40 kg )1/2 = 0.402 m( < 0.450 m)
综上所述,B轴中心的距离根据允许惯性矩而受限制,其值为0.402 m以内。
n Torque Map
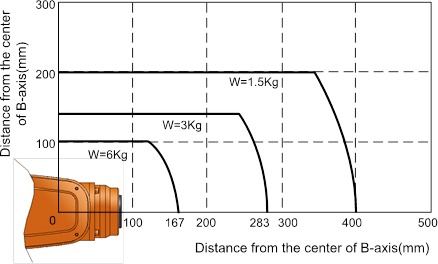
图 3.10 手腕轴扭矩线图 [HA006]
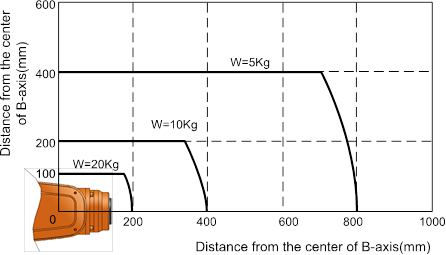
图 3.11 手腕轴扭矩线图 [HA020W]
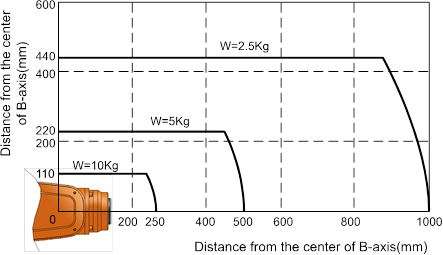
图 3.12 手腕轴扭矩线图 [HA010LW]