3.5.3. 安装面精度
3.5.3. 安装面精度
在机器人本体的板(PLATE)安装面四处,其安装面的平面度及相互高度误差须满足指定的规格,必要时请使用SHIM。
n 注意
① 四个链接基板(Plate)的平面度应为0.5 mm 以下。
② 板(PLATE)安装面4处的相互高度误差不得大于0.5mm。
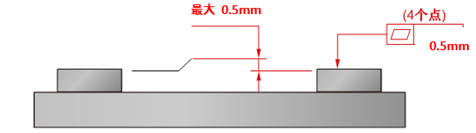
图 3.5 安装面精确度
在机器人本体的板(PLATE)安装面四处,其安装面的平面度及相互高度误差须满足指定的规格,必要时请使用SHIM。
n 注意
① 四个链接基板(Plate)的平面度应为0.5 mm 以下。
② 板(PLATE)安装面4处的相互高度误差不得大于0.5mm。
图 3.5 安装面精确度