3.6.1. 允许负载转矩的估算
3.6.1. 允许负载转矩的估算
拟施加于机器人手腕轴前端的负载由允许重量、允许负载转矩、允许转动惯量限制。在计算负载转矩及转动惯量时所使用的坐标系方向与机器人基坐标系的方向相同。对于R2轴的检查,按照与B轴相同的方法进行。
n Step 1
根据B轴的旋转中心计算出重心位置(LX, LY, LZ)
Lx:X轴方向的重心位置
Ly:Y轴方向的重心位置
Lz:Z轴方向的重心位置
n Step 2
计算从B轴、R1轴到重心之间的距离
 ,
, 
LB:从B轴旋转中心到重心之间的距离
LR1:从R1轴旋转中心到重心之间的距离
n Step 3
以计算出的距离为准计算负载转矩


 :在B轴旋转中心上的负载转矩
:在B轴旋转中心上的负载转矩
 :在R1轴旋转中心上的负载转矩
:在R1轴旋转中心上的负载转矩
 :负载质量
:负载质量
 :重力加速度
:重力加速度
n Step 4
以允许负载转矩表为准,请确认在Step 3上所计算出的负载转矩是否小于限值。
n 注:如果其负载质量与以下转矩图表上的质量差不多,当检验负载转矩时,无需考虑Step 3及Step 4,而确认在Step 2上计算出的距离是否分布在转矩图表范围内即可。若其处于转矩图表范围内,就意味着所计算出的负载转矩小于允许负载转矩;若其超出转矩图表范围,则意味着所计算出的负载转矩大于允许负载转矩。
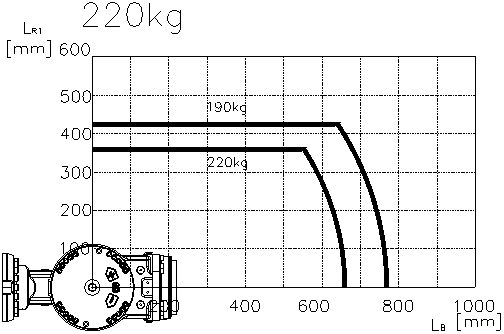
图 3.9手腕轴转矩图表
 允许负载转矩
允许负载转矩
表3‑1允许负载转矩
有效载荷 | 允许负载转矩 | ||
R2轴旋转 | B轴旋转 | R1轴旋转 | |
HS220S | 1422 N·m(145kgf·m)以内 | 770 N·m(79 kgf·m)以内 | |