3.6.3. 允许转矩、转动惯量的计算用例 (HS180 Case)
3.6.3. 允许转矩、转动惯量的计算用例 (HS180 Case)
(1) Case #1 简单的二维模型
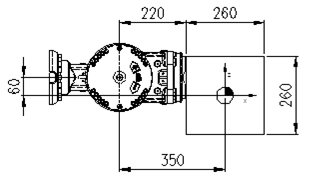
图 3.10二维负载模型
M - 负载重量
JXX - 从负载重心向X轴方向的转动惯量
JYY - 从负载重心向Y轴方向的转动惯量
JZZ - 从负载重心向Z轴方向的转动惯量
Ja4 - 在R2轴旋转中心上的转动惯量
Ja5 - 在B轴旋转中心上的转动惯量
Ja6 - 在R1轴旋转中心上的转动惯量
☞ 负载条件:横、纵260mm、厚260mm的不锈钢(Mass 138.15kg)
① 重量限制
负载重量:
② 允许转矩限制
以B轴为准,重心位置 LX = 350mm, LY = 0mm, LZ = -60mm
从B、R1轴到重心之间的距离如下:
B轴基准距离
R1轴基准距离
B轴负载转矩
R1轴负载转矩
③ 允许转动惯量限制
在重心上负载的转动惯量Jxx= 1.56kgm2, Jyy= 1.56 kgm2, Jzz= 1.56 kgm2
B轴转动惯量(Ja5)

R1轴转动惯量(Ja6)

④ 结论
重量、转矩、转动惯量条件都满足限制条件,从而可保障安全。
(2) Case #2 复杂的三维模型

图 3.11三维负载模型二维形状
铝块形状组合
(σ=0.0027 g/mm3: 176.3 kg)
m1 (60×300×300) 14.6kg
m2 (480×440×220) 125.4 kg
m3 (280×300×160) 36.3 kg
mi - i块负载重量
LXi - i块X轴方向重心位置
LY - i块Y轴方向重心位置
LZi - i块Z轴方向重心位置
① 重量限制
负载重量:
② 允许转矩限制
以B轴旋转中心为准计算的全体负载的重心位置如下:

 (因为Y轴对称)
(因为Y轴对称)

以全块B轴为准的重心位置 = 520.85mm,
= 520.85mm,  = 0mm,
= 0mm,  = -238.47mm
= -238.47mm
从B轴到重心之间的距离
从R1轴到重心之间的距离
B轴负载转矩
R1轴负载转矩
x1 y1 z1 – m1块的x、y、z方向长度
x2 y2 z2 – m2块的x、y、z方向长度
x3 y3 z3 – m3块的x、y、z方向长度
LX1, LY1, LZ1 - 以B轴旋转中心为准的m1块重心位置
LX2, LY2, LZ2 - 以B轴旋转中心为准的m2块重心位置
LX3, LY3, LZ3 - 以B轴旋转中心为准的m3块重心位置
Jxx1, Jyy1, Jzz1 – 以m1块重心为准的x、y、z轴转动惯量
Jxx2, Jyy2, Jzz2 – 以m2块重心为准的x、y、z轴转动惯量
Jxx3, Jyy3, Jzz3 – 以m3块重心为准的x、y、z轴转动惯量
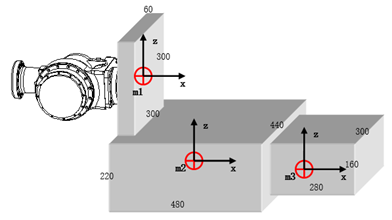
图 3.12三维负载模型三维形状
③ 允许转动惯量限制
表3‑3各块重心的转动惯量
块重量(kg) | 重心(LX, LY, LZ) | Jxx | Jyy | Jzz |
m1 (14.6) | (0.25, 0, 0) | 0.219 kgm2 | 0.114 kgm2 | 0.114 kgm2 |
m2 (125.4) | (0.48, 0, -0.26) | 2.530 kgm2 | 2.915 kgm2 | 4.433 kgm2 |
m3 (36.3) | (0.89, 0, -0.26) | 0.350 kgm2 | 0.314 kgm2 | 0.509 kgm2 |
B轴转动惯量(Ja5)

R1轴转动惯量(Ja6)

④ 结论
重量、转矩、转动惯量条件都满足限制条件,从而可保障安全。