2.5. 轴的识别
2.5. 轴的识别
表2‑2 轴活动
轴名称 | 操作 | 悬挂指挥按钮 | |
S | 机械臂旋转 | 左(S+) | 右(S-) |
H | 机械臂向前和向后 | 后(H+) | 前(H-) |
V | 机械臂向上和向下 | 上(V+) | 下(V-) |
R2 | 机械腕旋转 2 | 正(R2+) | 负(R2-) |
B | 机械腕弯曲 | 正(B+) | 负(B-) |
R1 | 机械腕旋转 1 | 正(R1+) | 负(R1-) |
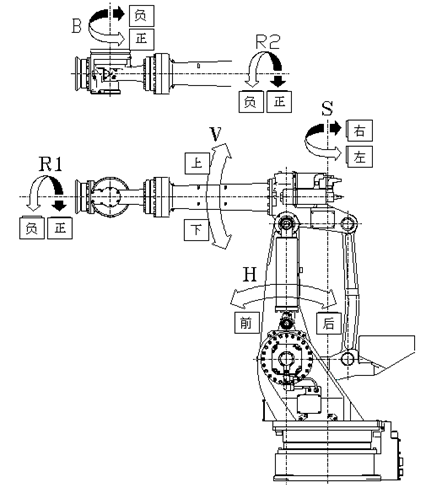
图2.9 机器人尺寸和轴
表2‑2 轴活动
轴名称 | 操作 | 悬挂指挥按钮 | |
S | 机械臂旋转 | 左(S+) | 右(S-) |
H | 机械臂向前和向后 | 后(H+) | 前(H-) |
V | 机械臂向上和向下 | 上(V+) | 下(V-) |
R2 | 机械腕旋转 2 | 正(R2+) | 负(R2-) |
B | 机械腕弯曲 | 正(B+) | 负(B-) |
R1 | 机械腕旋转 1 | 正(R1+) | 负(R1-) |
图2.9 机器人尺寸和轴