4.3.2.1. 概要
4.3.2.1. 概要
进行针对机器人运行的运算和控制、内置了多种通信接口功能。通过串行、以及网、CAN等多种通信端口、与周边设备进行连接、可以构筑多种MMI(Man-Machine Interface)环境。通过示教盒管理如控制器常数、错误历史记录、操作记录、示教程序等信息文件。
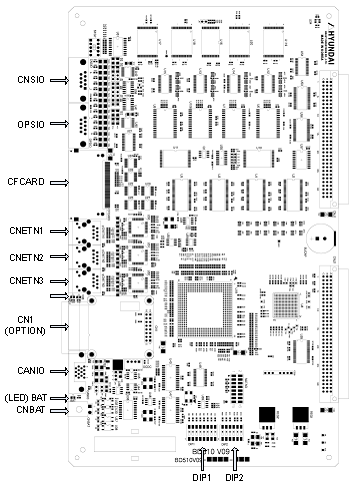
图 4.17 主板(BD510)
进行针对机器人运行的运算和控制、内置了多种通信接口功能。通过串行、以及网、CAN等多种通信端口、与周边设备进行连接、可以构筑多种MMI(Man-Machine Interface)环境。通过示教盒管理如控制器常数、错误历史记录、操作记录、示教程序等信息文件。
图 4.17 主板(BD510)