6.1.12.2. 原因及检查方法
6.1.12.2. 原因及检查方法
(1) 请确认发生错误的轴是否与其他设备有机械性干涉。
(2) 请检查马达电源线路。 n 请确认连接机器人和控制器的配线。 n 请确认机器人机内配线。 n 请确认控制器内部配线。
(3) 请检查控制器内部伺服基板与驱动装置间的CNBS电缆。
(4) 请替换其它配件。 |
(1) 请确认发生错误的轴是否与其他设备有机械性干涉。
有机器人的机械性干涉或冲突时会发生此错误。超过限制区域时应通过手动操作将机器人移动到安全区域。
(2) 请检查马达电源线路。
请关闭1次电源后分离该轴驱动装置的U、V、W并检查各相的短路与否。请利用万用表(测试仪)等装备1: 1确认各相配线。
| 警告(Warning) 在投入电源的状态下检查可能会导致触电危险、请注意。 |

n 请确认连接机器人和控制器的配线。
去除连接控制器与机器人或驱动装置的配线、确认各相(U相、V相、W相)是否相互或与接地短路的地方、如果有短路的地方、就应替换该配线。
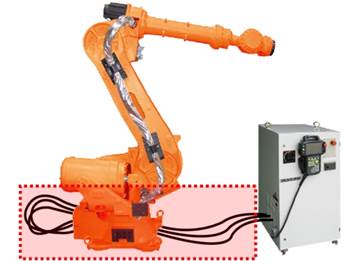
<外部配线>
图 6.67 机器人与控制器间的基本安装结构图
n 请检查机器人内部的机内配线。
需要检查连接于机器人内部马达的配线是否有短路或配错的地方。

图6.68 机器人机内配线
n 请检查控制器内部配线。
需要检查控制器内部的AMP和所安装的配线检查。
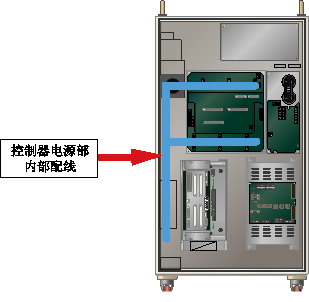
图6.69 控制器内部(电源部)
(3) 请检查控制器内部伺服板(DSP板)与驱动装置间的CNBS电缆。
请检查CNBS电缆是否正确安装。电缆没有正确安装或电缆不良时可能会发生该错误。
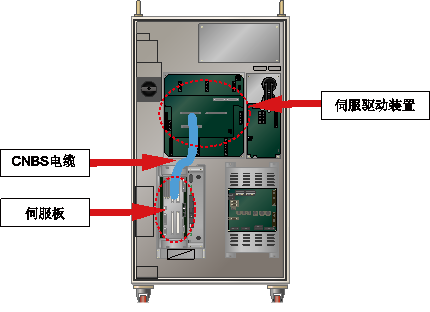
图 6.70 控制器内部(CNBS电缆)
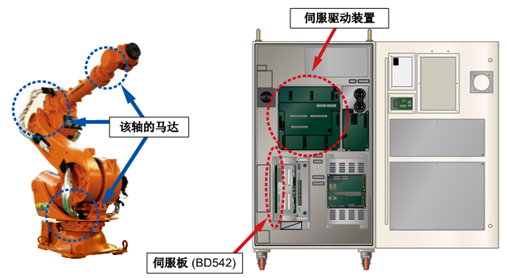
(4) 请替换其它配件。
按伺服板(BD542) → 伺服驱动装置 → 马达的顺序替换并确认错误发生与否。