6.1.15.2. 原因及检查方法
6.1.15.2. 原因及检查方法
(1) 请确认发生错误的轴是否与其他设备有机械性干涉。
(2) 请确认制动器解除是否正常工作。 n 个别轴制动器解除异常检查 n 制动器用电源异常检查
(3) 请检查配线状态。
(4) 请确认是否使用额定负荷。
(5) 位置偏差设置等级错误
(6) 请替换其它配件 |
(1) 请确认发生错误的轴是否与其他设备有机械性干涉。
有机器人的机构性干涉或冲突时、可能会发生此错误。超出限制区域时应通过手动操作将机器人移动到安全区域。
(2) 请确认制动器解除是否正常工作。
可能是该轴制动器的解除功能有问题或制动解除电压的故障。
n 个别轴制动器解除异常检查
去除马达电源后(马达OFF)使用制动器手动开关确认该轴的制动器是否被解除。解除制动器时、可通过从马达发出的声音来确认。
| 警告(Warning) 解除制动器的同时机器人轴可能会降落、请注意。 |

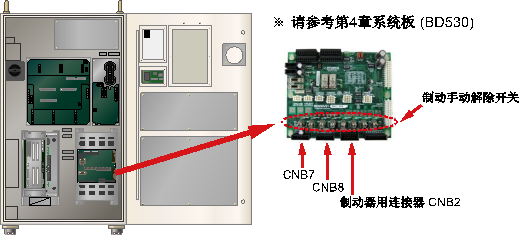
图 6.80 制动手动解除开关的位置
如果该轴的制动没有被解除、就应确认系统板的制动解除电压输出状态。去除制动器配线(CNB2、 CNB7、 CNB8 连接器)后使用手动制动开关并输出制动电压。在CNB2或CNB7、CNB8连接器测定该轴的制动电压是否以20V以上输出。如果有以20V以下电压输出的轴、就是系统板(BD530)的故障、应替换。
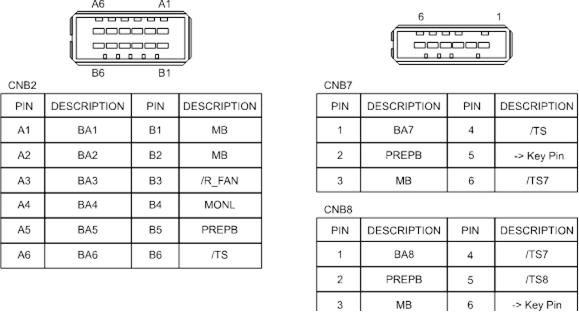
图 6.81 CNB2、CNB7连接器的销排列
n 制动电源故障检查
如果发生“E0012制动电源故障”信息、就表示制动电源装置有异常。在TP打开“『[F1]: 服务』→ 『1: 监测』→ 『2: 输入出信号』→ 『1: 专用输入信号』”窗、就有“过载(Brake电源)”项目。如果这被显示为黄色、就表示电气模块的制动电源用保险丝被断开。请替换该保险丝。

图 6.82 电气模块
如果保险丝也是正常、就请在系统板测定制动电源(DC24V)。基板的中央附近布置有3个测试销。其中以TMB为基准端子、TPPB端子值应为DC20V以上才是正常。如果是20V以下、就表示生成制动电源装置故障。请替换电气模块。
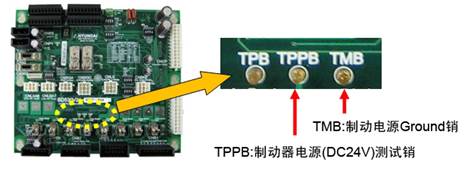
图6.83 制动电源测试销
(3) 请检查配线状态。
请确认马达配线(U、 V、 W相)是否与其他配线或接地线(FG)短路。
(4) 请确认是否使用额定负荷。
包括作业物在内整体重量超过额定负荷、就请参考该机器人的规格书、并把负荷调整为额定负荷以内。
(5) 位置偏差设定等级错误
位置偏差设定值比以下测定最大值、就请把设定值往上调整。
启动数量循环异常后的位置偏差测定最大值x1.5

图 6.84 在TP的位置偏差测定最大值监测画面
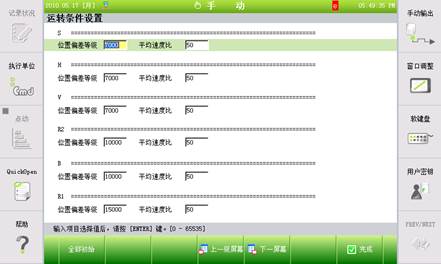
图 6.85 在TP的位置偏差设定值变更画面
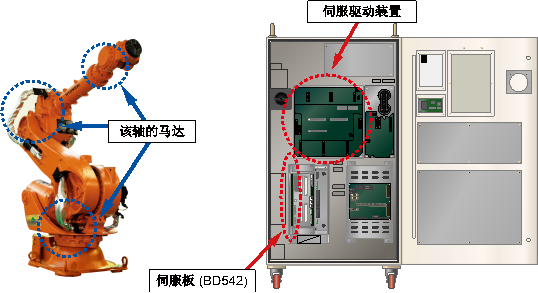
(6) 请替换其它配件
请按伺服基板(BD542) → 伺服驱动装置 → 马达的顺序替换并确认错误发生与否。