6.1.20.2. 原因及检查方法
6.1.20.2. 原因及检查方法
(1) 请检查基板与伺服板是否正确安装。 n 请检查基板是否正确安装。 n 请检查基板异常与否。
(2) 请检查是否有机器人急剧动作的作业程序。 |
(1) 请检查主板与伺服板是否正确安装。
如果主板与伺服板没有正确安装于Rack或基板有问题、就会导致通讯有问题、并发生错误。
| 警告(Warning) 为了保护之前作也程序、从Rack去除基板之前必须利用USB软盘备份主板的所有文件。 |

在USB软盘备份主板文件的方法如下。

图 6.108 在TP插入USB的方法
TP辨识USB后画面就会显示如下图标。

为了备份文件、进入
Ø 服务
Ø 5. 文件管理
Window就会显示如同探索器的画面。

在此复制显示于M/B的文件后放入USB即可。
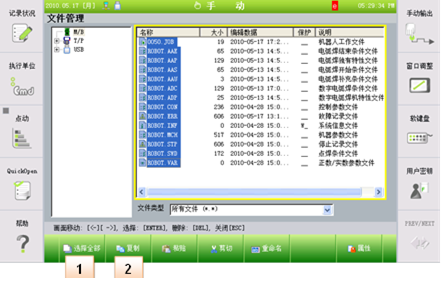
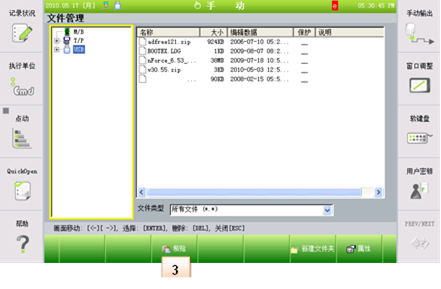
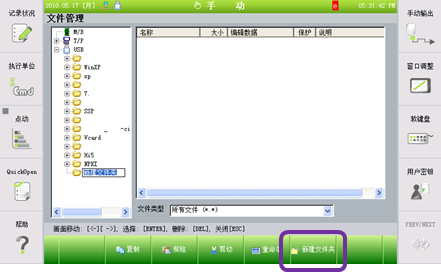
如探索器所示、可在USB创建新文件夹、使用软键盘变更文件夹名称。

n 请检查基板是否正确安装。
请从Rack去除主板与伺服板后重新安装。
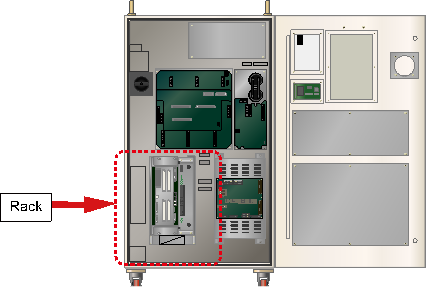
图 6.109 控制器内部Rack位置
n 请检查基板异常与否。
为了判断基板异常与否、请替换基板。
(2) 请检查是否有机器人急剧工作的作业程序。
请确认机器人工作中动作急剧变化的区段是否发生错误。
如果、在急剧的动作中发生错误、就需要修改该作业程序。
在急剧的动作中发生错误的原因如下。执行作业程序时移动短区段而导致机器人的姿势严重扭曲。这时、机器人的轴速度突然提高、伺服基板不能跟随其速度时会发生错误。解决方法是修改姿势急剧变化的示教点或修改机器人姿势。