6.1.21.2. 原因及检查方法
6.1.21.2. 原因及检查方法
(1) 请确认工具数据是否正确输入。
(2) 请确认机器人姿势是否处于特异点附近。
(3) 附加轴确认加减速参数设定值和工作中的负荷率。
(4) 请调整作业程序。 |
(1) 请确认工具数据是否正确输入。
工具重量或惯性与注册于控制器的值大有不同、机器人控制性能就会恶化、并发生超出最高速错误。工具重量和惯性可在以下菜单按照工具编号注册。
Ø 系统
Ø 3. 机器人参数
Ø 工具数据

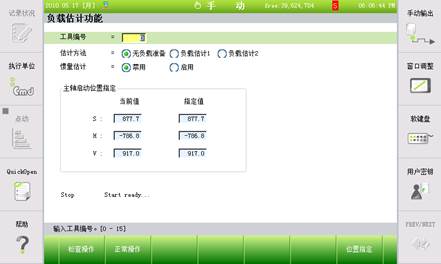
为了自动设定工具重量或惯性、可在以下菜单使用负载估计功能。
Ø 系统
Ø 自动正数设定
Ø 4. 负载估计功能
(2) 请确认机器人姿势是否处于特异点附近。
在特异点附近的籽实中、没有执行PtP插补、而是执行L插补或C插补、就可能会发生错误。特异点在B轴接近0deg的情况和手腕部中心接近S轴旋转中心轴时发生。需要经过特异点附近时请把该步骤变更为PtP插补。
|
|
图 6.110 B轴特异点 | 图 6.111 S轴特异点 |


(3) 附加轴请确认加减速参数设定值和动作中负荷率。
附加轴加减速参数的最高速过高或加速时间过短而导致马达扭矩不足。应观察机器人工作中的负荷率并降低I/Ip最高速或大幅调整加速时间。
Ø 系统
Ø 3. 机器人参数
Ø 34. 加减速参数
在此可以修改附加周德加减速参数

(4) 请调整作业程序。
请变更作业程序的该步骤或之前步骤的步骤条件。第一、变更为“Acc=0”;第二、降低步骤的速度;第三、在移动经路添加一个步骤、按照以上方法变更程序条件。