6.1.23.2. 原因及检查方法
6.1.23.2. 原因及检查方法
(1) 请确认编码器供应电压。
(2) 请替换伺服基板并测试。
(3) 请替换马达并测试。
(4) 请检查配线。
(5) 采取措施后请检查配线的通讯状态。 |
(1) 请确认编码器供应电压。
供应到编码器的电源电压、编码器侧连接器供应电压应处于5V±5% (4.75V ~ 5.25V)范围内。 编码器侧连接器电压下降到4.75V以下时、编码器不会正常工作、导致发生上述错误。
请测定编码器侧连接器pin(3-4)的电压。
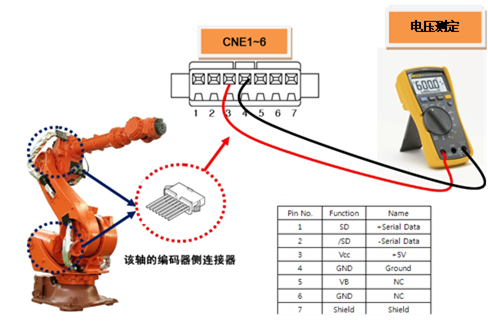
所检测的电压比标准电压低时、请旋转编码器电源供应装置的+5V ADJ(E)电压调整端子、使之编码器侧连接器电压处于标准电压以内。

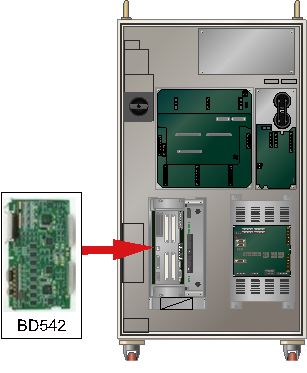
(2) 请替换伺服板并测试。
替换伺服板后不发生错误、就是伺服板的不良。请把伺服板替换为正常品。
(3) 请替换马达并测试。
替换伺服马达后不发生错误、就是伺服马达的不良。请把伺服马达替换为正常品。下图显示HS165 机器人的各轴马达位置、其它机器人请参考该型号维修说明书并替换。
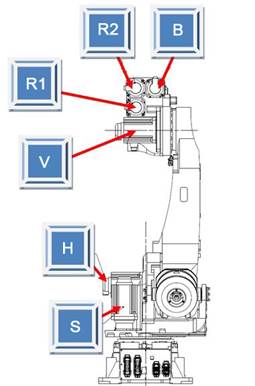
图 6.116 HS165 机器人的各轴马达位置
(4) 请检查配线。
编码器的配线检查顺序如下。
1次: 请检查与编码器配线有关的连接器的接触不良与否。
2次:
请检查编码器配线的短路与否。请利用万用表(测试仪)等装备1: 1确认各相配线。
3次: 请替换编码器配线并测试。
编码器配线没有断线的状态下、出现Shield线的接触不良、编码器信号线与其他电力线或机器人本体金属部位的接触等现象时、只通过短路有无检查不能检测出、请替换配线并测试。
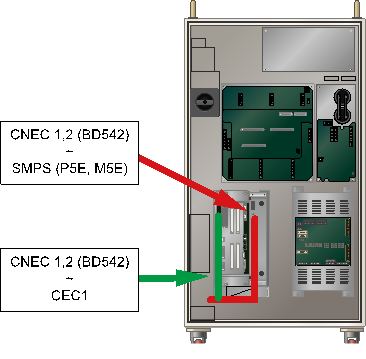
n 请检查控制器内部配线。
请检查CNEC1、2(BD542)连接器与SMPS(P5E、M5E)间的配线。
请检查CNEC1、2(BD542)连接器与CEC1之间的配线。
n 请检查控制器与机器人之间的配线。
请检查CNEC1与CER1之间的配线。
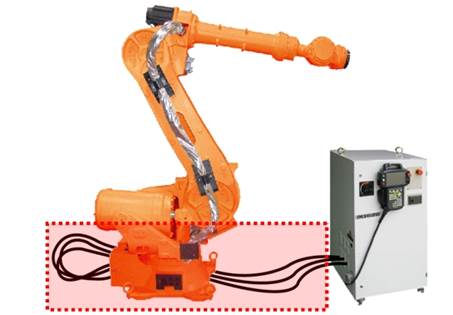
图 6.117 机器人与控制器之间的基本安装结构图
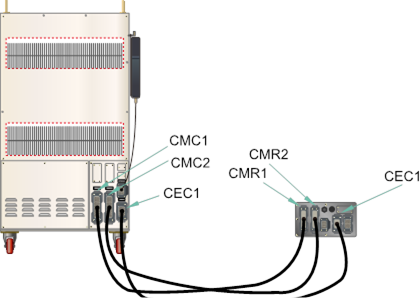
图 6.118 机器人本体与控制器的连接
n 请检查本体内部配线。
请检查CER1与CNE1~6(编码器侧连接器)之间的配线。
配线检查请参考机器人维修说明书的配线连接图。

图6.119 机器人机内配线
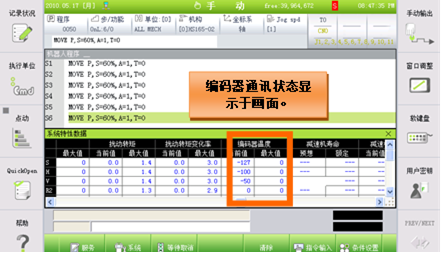
(5) 采取措施后请检查配线的通讯状态。
对问题部分采取措施后、请参考『编码器通讯失败次数标示功能说明书』检查通讯状态。
通讯失败次数 | 编码器状态 | 内容 |
0~2 | 正常 | 正常状态 |
3~5 | 检查 | 配线、编码器或基板需要检查 |
6~8 | 警告 | 严重的状态、机器人可能会被停止 |