6.1.9.2. 原因及检查方法
6.1.9.2. 原因及检查方法
(1) 请确认错误发生状态。 n 请在监测窗确认专用输入信号。 n 请确认BD58B基板的继电器工作状态。
<在监测窗显示为错误状态、继电器为正常(ON)时> (2) 请检查错误感知相关配件。 n 请替换CNSGC电缆后检查。 n 请替换BD530/BD531板后检查。
<在监测窗显示为错误状、继电器为非正常(OFF)时> (3) 请检查机器人。 n 请确认机器人驱动部带的状态。 n 请确认带破断传感器的工作状态。 |
(1) 请确认错误发生状态。
n 在TP510的监测窗确认专用输入信号
首先在示教盒的专用输入信号窗确认升降轴带/限位(Arm)项目是否继续输入。选择『[F1]: 服务』→ 『1: 监测』→ 『2: 输入出信号』→ 『1: 专用输入信号』就可以查看此窗。如果升降轴带/限位(Arm)项目显示为黄色标记、就表示错误状态。

图 6.51 在专用输入信号中确认升降轴带
n 确认BD58B板的继电器动作状态
安装于机器人驱动部的近接传感器感知带表面的光反射与否、并将ON/OFF信号发送到控制器。输入于控制器的信号在BD58B板与防落制动器联动的同时传达到系统板BD530。请通过BD58B板的继电器动作状态确认传感器的工作与否。
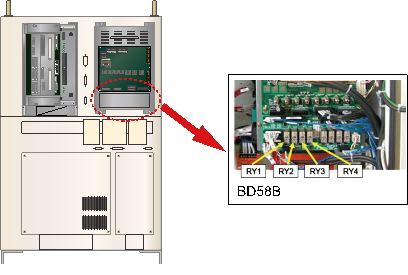
图 6.52 确认BD58B板的继电器状态
如下图所示、可以确认BD58B板的继电器工作状态。正常状态的继电器因线圈工作、可以确认中央的空白处。

图 6.53 BD58B板的继电器的正常与错误状态比较
可通过BD58B板的继电器工作状态确认机器人内某一轴的传感器工作与否。
① 正常时 | ② Z1传感器Off时(Z1轴破断) |
|
|
③ Z2传感器Off时(Z2轴破断) | ④ Z1/Z2传感器同时Off时(Z1/Z2轴破断) |
|
|



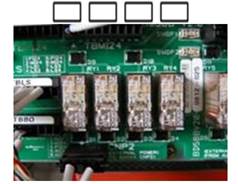
图 6.54 在BD58B板的继电器确认错误发生位置
(2) 请检查错误感知相关配件。
确认道监测窗的专用输入信号与BD58B板的继电器状态不同、就是连接BD58B与 BD530/BD531的CNLS电缆或BD530/BD531的不良。请参考说明书的控制器结构并检查各配件。
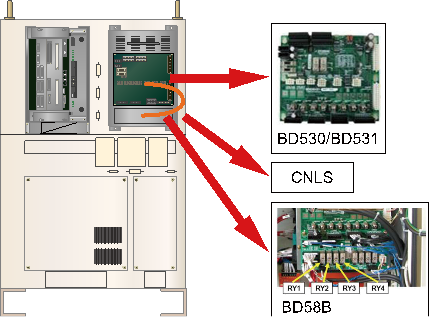
图6.55 BD530/BD531的替换
n CNLS 电缆替换检查
将CNLS电缆替换成正常品后不发生错误、就是电缆的接触不良。请把CNLS电缆替换成正常品后使用。
n BD530/BD531替换检查
将BD530/BD531替换成正常品后不发生错误、就表示该基板的不良。请把BD530/BD531替换成正常品后使用。

图6.56 BD530/BD531的替换
(3) 请检查机器人。
监测窗的专用输入信号与BD58B板的继电器状态一致、就表示在BD58B实际辨识了传感器的错误动作。应确认机器人的带和传感器。检查机器人时为了防止升降轴因感应器的误动作而降落、必须分开BB58B板的CNZB1和CNBZ2连接器。
| 警告(Warning) 检查机器人的带及破断感应器时、为了防止升降轴的降落、必须分开BD58B的CNZB1和CNBZ2连接器。 |

n 确认机器人驱动部的带状态
请在机器人确认通过BD58B继电器状态确认的轴带。带的适用与否和位置会根据机器人型号而不同。请根据机器人规格书及机器人维修说明书检查带的状态。
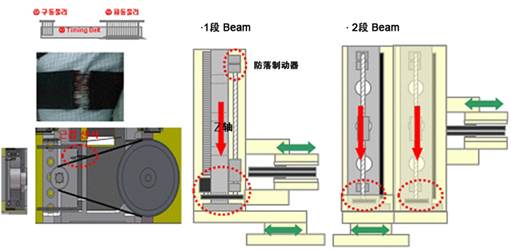
图 6.57 升降轴带和破断传感器的感知
n 确认带破断传感器的工作状态
传感器为光学形式、在一定距离范围内辨识物体的情况下才会被检测为正常、超过其范围时就会判为不良。请在传感器的前面变更物体的距离后确认TP510的专用输入信号状态。传感器的动作与监测结果不一致时请确认机器人内部的感应器和控制器内BD58B板的TBBO接线板之间的信号线连接状态。传感器的LED显示为绿色就表示正常状态、变为红色就表示错误状态。