3.2. 附加轴常数设置
3.2. 附加轴常数设置
(1) 在手动模式下选择『[F2]: 系统』 → 『5: 复位』 → 『5: 其它轴常数设置』。
(2) 设置附加轴常数。
(3) 按『[F7]: 完成』键,完成设置。
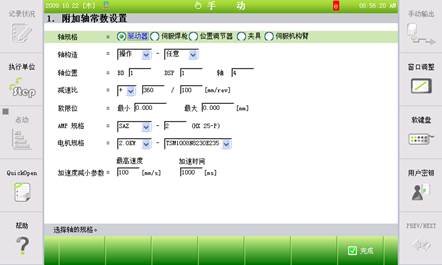
◆ 【附加轴常数】◆
(1) 轴规格 :
在<驱动器、伺服焊枪、位置调节器、夹具、伺服机构臂>中选择附加轴类型。
决定附加轴规格时,应按逻辑附加轴顺序遵守[驱动器 → 伺服焊枪 →位置调节器 →夹具 →伺服机构臂]顺序。
(2) 轴构成 : 选择轴的工作姿势和方向。
关于直线驱动器(行走轴),前/后轴行走时选择<X>, 左/右轴行走时选择<Y>, 上/下轴行走时选择 <Z>。驱动器没有置于与机器人坐标系相同的方向时,选择 <任意>,并执行『驱动器校准』。 旋转驱动器也与直线驱动器相同,选择Rx/Ry/Rz或<任意>,并执行『驱动器校准』。设置伺服焊枪时请参考『点焊焊接功能说明书』,使用位置调节器时参考『位置调节器同步功能说明书』。
(3) 轴位置 : 用户可指定附加轴的物理性结构。
BD =[1](1∼2) => 指定BD542板的编号。(2DSP/1Board)
DSP =[1](1∼2) => 指定BD542板内的DSP编号。(4Axis/1DSP)
Axis =[4](1∼4) => 指定轴编号。
例) 设置7号附加轴时如果指定为1、1、4…
驱动器6轴 – 主轴3轴(1号 BD542, 1号 DSP, 1∼3轴)
手腕3轴 (1号 BD542, 2号 DSP, 1∼3轴)
附加1轴 (1号 BD542, 1号DSP, 4号轴)
(4) 减速比 : 注册马达每旋转一圈时的轴移动量 。
马达每旋转一圈时的直线行走轴移动距离按mm单位注册, 马达每旋转一圈时的旋转轴旋转角度按 deg单位注册。 关于符号, 如果马达的正向(编码器增加方向)与轴工作方向一致,附加轴坐标值增加, 就标“+”符号, 相反,坐标值减少就标“-”符号。 请参考以下例示。
例 1)如果是只使用1/100减速器的旋转轴…
马达旋转100圈时,轴旋转360deg,
因此,减速比 = + 360 / 100 [deg/rev]
例 2) 如果是使用1/20减速器和PCD 110mm的齿轮的直线行走轴…
马达旋转20圈时,移动距离为110xPhi(=3.14159)=345.5749[mm]
因此,减速比 = + 3455749 /200000 [mm/rev]
例 3) 如果是使用1/5减速器和Lead 5mm滚珠丝杠的直线行走轴…
马达旋转5圈时,轴移动距离为5mm,
因此,减速比 = + 5 / 5 [mm/rev]
(5) 软限制 : 设置机器人有效工作区域(附加轴软限制)。
如果把直线行走轴设置为[mm]、旋转轴设置为[deg],就会把设置值反映到『[F2]: 系统』 → 『3: 机器人参数』 → 『3: 软限位』。
(6) AMP规格: 选择要使用于附加轴的AMP规格。
选择IPM 符号,输入数字0-5设置霍尔传感器规格,选择AMP规格。AMP的型号规格如下。

按照IPM符号和霍尔传感器符号将具备以下额定容量。
AMP Model | IPM 符号 | IPM 额定电流 | Hall Sensor | Full Scale 电流 | |
大型 | L | 150Apeak | 0 | 140.62Apeak | |
1 | 93.75Apeak | ||||
X | 100Apeak | ||||
2 | 46.87Apeak | ||||
Y | 75Apeak | 3 | 28.12Apeak | ||
4 | 18.75Apeak | ||||
Z | 50Apeak | ||||
5 | 9.37Apeak | ||||
小型 | A | 30Apeak | 3 | 28.12Apeak | |
4 | 18.75Apeak | ||||
D | 10Apeak | ||||
5 | 9.37Apeak |
(7) 马达规格 : 选择使用于附加轴的马达规格。
先选择马达容量后,选择马达规格。
(8) 加减速参数: 设置附加轴的最高速和加速时间。
在此设定的值与『[F2]: 系统』 → 『3: 机器人参数』 → 『34: 加减速参数』的设置值相同适用。附加轴的最高速由用户指定,但根据马达的额定速度而受限制。
附加轴驱动中如果发生震动,就应调整加速时间。