1.3. 弧焊应用程序条件设置
1.3. 弧焊应用程序条件设置
在手动模式画面点击『[F2]: 系统』→『4: 应用参数』→『2: 电弧焊』即出现如下所示的设置Arc焊接应用条件的画面。
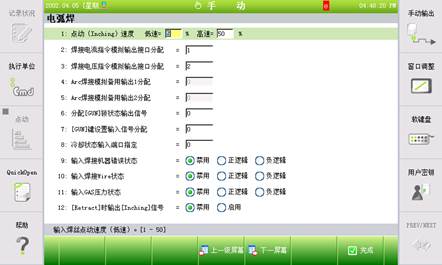
图 1.8 弧焊应用条件对话框
每个项目的详细信息如下所述。
(1) 点动(Inching)速度: [1 ~ 25]
[1 ~ 50]、[10 ~ 100]: Inching速度设置是使用[送出]、[后退]键时进行wire inching及retract的Wire送进速度、Wir送进速度以电流值进行设置。是设置低速及高速(按键达3秒以上时的动作)时的送进速度。(参阅Inching及Retract功能)
(2) 焊接电流指令模拟输出接口分配:[1 ~ 32]
设置生成弧焊电流参考电压的模拟输出端口数字。
(3) 焊接电压指令模拟输出接口分配:[1 ~ 32]
设置生成弧焊电压参考电压的模拟输出端口数字。
(4) Arc焊接模拟备用输出1分配: [1 ~ 32]
设置生成在备用弧焊输出端口1上的参考电压的模拟输出端口数字。
(5) Arc焊接模拟备用输出2分配: [1 ~ 32]
设置生成在备用弧焊输出端口2上的参考电压的模拟输出端口数字。
(6) 分配[GUN]锁状态输出信号:[正常输出信号的分配]
设置用来输出示教盒(Teaching pendant)[GUN]键当前状态的输出信号。
(7) [GUN]键设置输入信号分配:[正常输入信号的分配]
分配从外部操作[GUN]键on/off设置的输入信号。分配该信号后不能按示教盒的[GUN]键来变更on/off状态。该功能可防止因为用户不小心按[GUN]键而造成在焊接区间不进行焊接的问题。[GUN]键的LED在关闭状态下机器人被启用时运行在Arc焊接区间不执行焊接的‘Dry Run’、输入分配信号时[GUN]键被关闭执行‘Dry Run’。
(8) 冷却状态输入端口指定:[正常输入信号的分配]
使用水冷式Arc焊接Torch时设置接收冷却水循环问题发生状态的信号。当在焊接期间接到这个信号、机器人将其认为是一个错误、并停止运动和焊接操作。
(9) 输入焊接机器错误状态:[禁用、正逻辑、负逻辑]
设置焊接错误状态接收信号的使用与否和逻辑。
(10) 输入焊接Wire状态:[禁用、正逻辑、负逻辑]
设置焊接Wir状态接收信号的使用与否和逻辑。
(11) 输入GAS压力状态:[禁用、正逻辑、负逻辑]
设置气体压力状态接收信号的使用与否和逻辑。
(12) [Retract]时输出[Inching]信号:[禁用、启用]
选择Wire在[Retract]时是否附带[Inching]信号输出功能。
使用需要该功能的焊机时设置成有效。
(13) 设置Arc传感数字滤波器:[0 ~ 200]
设置将适用于电弧感应模拟输入值之中的数字过滤器值。当输入0或1的时候、数字过滤器将不适用。
(14) Arc传感模拟输入接口分配:[-2 ~ 32]
这个输入端口接收在弧感应中使用的焊接电流测量值。当使用支持CAN通讯的焊接的电弧感应的时候、设置-1和-2。-1使用焊机输入值、-2使用数字过滤器。
(15) I、V变更时自动保存:[禁用、启用]
确定在“更改弧焊电流/电压”框中更改电流和电压的时候、是否使用自动保存。请参阅“9: 焊接电流/电压更改功能”以了解更多详细信息。
(16) 设置焊接中监测自动活性:[禁用、启用]
当弧焊开始的时候、弧焊监测将自动设置在屏幕上显示功能的使用。
(17) 设置高重量电弧焊枪用滤波器:[禁用、启用]
设置是否使用重型Arctorch用过滤器。重型Arctorch用过滤器可减少使用水冷式Torch等重型Torch时产生的振动。(但有可能减缓机器人的作业速度)
(18) 手动模式电弧焊接设置:[禁用、启用]
设置在手动模式下能否通过步进进行焊接。设置为‘启用’时在执行单位设为‘End’的状态下步进到Arc焊接区间即可进行焊接。