7. 参考点 (REFP)
在弧焊中加宽焊接缝使用的织造功能、要求决定织造形状的因素。大部分情况下、织造条件文件就足够了。
但是根据放置的母金属的形式、要求决定织造计划的参考点、在织造的垂直面与机器人坐标的Z轴不相符、访问点与织造方向不同、前进方向不能决定或者这些问题之中的有些问题结合出现。这个时候所使用的示教参考点的类型为参考点功能。

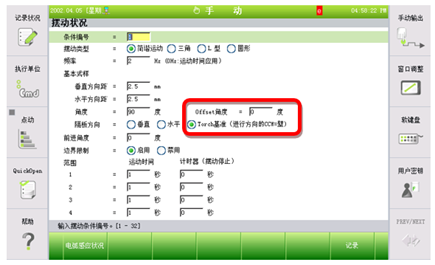
l 当根据‘Torch基准’、把织造条件设置为[基础图案] à [壁方向]的时候、不使用REFP 3 (参考点3)之外的其他REFP命令。
l 当使用织造功能的时候、我们推荐把壁方向用作‘Torch基准’。这样使得示教更加方便、因为REFP1、2、4变得不需要了。
7.1. 功能
为执行Weaving动作、需要如6.1说明的能够决定Weaving形态的轨迹形成位置的Weaving坐标系。设置的Weaving坐标系也用于Weaving功能的具体条件设置。
基本上在开始Weaving动作时、以机器人坐标系的z轴为壁方向、利用焊接开始点方向的接近点和进行方向自动生成Weaving坐标系(直角坐标系)。
但有时也有因接近点的位置和母材的形态、位置等无法创建Weaving坐标系或需要对基本设置的Weaving坐标系进行修改的情况(例如壁方向和他方向的角度不是90度时)。
这种情况下使用参照点功能可创建需要的Weaving坐标系以令Weaving形态和母材达到一致。
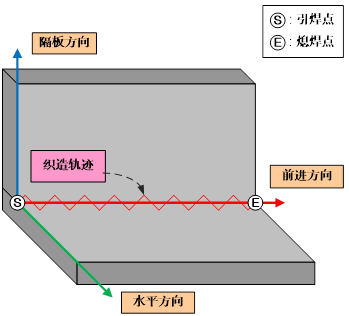
图 7.1 织造坐标
(1) REFP 1 (参考点 1)
这个命令指定壁方向。首先、在基础材料顶部的点记录为REFP 1。如此以来焊线(直线ⓢⓔ)和参照点1可决定一个面。把该面指定为壁方向基准后进行Weaving。如只设置参照点1、他方向则以所设定的壁方向为基准的进行方向自动设定为旋转90度后的方向。当根据‘Torch基准’设置‘隔板方向’的时候、不能使用这个命令。
(2) REFP 2 (参考点 2)
这个命令通过选择进行织造的象限、来确定其他方向。REFP 2记录了相应象限顶部的随机点。水平方向总体选择朝着接近点。 一般而言、把有接近点的一侧选为他方向。[图7-1]是在两个母材之间的空间上记录参照点2时所设置的Weaving坐标系的例示。如只设置参照点2、以机器人坐标系的Z轴为壁方向设置他方向。进行方向是从Weaving开始点到Weaving结束点的进行方向。 当根据‘Torch基准’设置‘隔板方向’的时候、不能使用这个命令。
(3) REFP 3 (参考点 3)
当机器人是固定的、只有定位器在固定织造中进行旋转的情况下、这个命令指定织造的前进方向。
(4) REFP 4 (参考点 4)
是设置壁方向和他方向角度的指令。[图7-1]是设置为90度时的例示。通过使用这个命令设置角度忽略通过[基础图案] à [角度]设置的任何值。
当根据‘Torch基准’设置‘隔板方向’的时候、不能使用这个命令。
(5) 没有REFP确定方向的标准
- 隔板方向:机器人坐标系的Z轴方向
- 水平方向:从壁朝着接近点侧的方向
- 前进方向:从织造开始点到结束点的方向
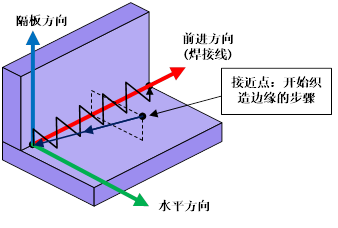

图 7.2 织造方向和参考点