3.4.1. 公用数据
3.4.1. 公用数据
与点焊顺序无关,设置可通用的数据。
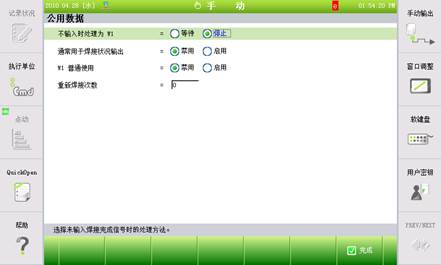
(1) 不输入时处理为 W1
选择超过所设定的焊接完成(WI) 等待时间,但没有输入WI而发生错误时的处理方法。等待或停止机器人。选择等待时,机器人不会停止,继续等待到输入焊接完成信号为止。
(2) 通常用于焊接状况输出
使用多台点焊焊机时,通常设置各焊机别焊接条件信号,但若想适用一个相同的焊接条件信号时,设置为 [启用]。
(3) W1 普通使用
使用多台点焊机时,通常设置各焊机别WI信号,但若想适用一个相同的WI信号时,设置为 [启用]。
(4) 重新焊接次数
虽然超过所设置的焊接完成(WI) 等待时间,但没有输入WI时执行重新焊接,重新焊接次数最大可设置为三次。按重新焊接次数重试, 仍没有输入WI时,就会发生错误, 遵循‘未输入WI时的处理’方式。