4.7.6. 镜像
4.7.6. 镜像
设置了轴S位置的程序和腕轴对称的程序是可以画出来的。(Y-Z面是对称中心。)
当需要两个对面的机器人执行相同的动作时(包括车辆的车身焊接等)、镜像就十分有用。给一个机器人示教某程序后、对面的另一个机器人会利用镜像对程序进行重新变换。这样、设置了轴S对称的新程序就得以创建。

图 4.12 原始程序 → 利用镜像而变换了的程序
(1) 选择『[F1]:服务』 → 『6:程序变换』 → 『6:镜像』。

(2) 输入数据后、按『[F7]:执行』。
n 原始程序:原始程序编号
n 目标程序:要利用镜像创建的程序变编号
n T1:如果需要对主轴做镜像变换、就要设置为<启用>。

l 如果任何轴在镜像变换过程中超过了软限位、该轴将在“范围超出步”里显示出来。
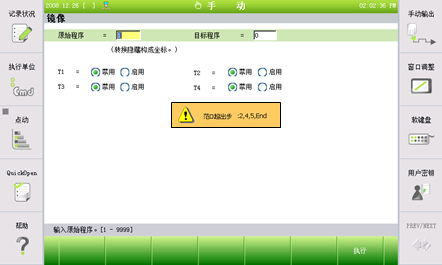
如果“范围超出步”里显示“End”、则说明检查完毕。如果“范围超出步”显示“=>”、则意味着还有超过限位的步。
l 亲自检查哪个轴超过了软限位并进行调节。
l 要对相同类型的机器人使用镜像功能、因为机器人的类型不同、其软限位也会不同。
l 要给两边的机器人设置相同的编码器标准位置和各轴0度位置。
l 要使用对称的焊枪和工具、或对称地安装焊枪和工具。