7.6.4. 负载估计功能
7.6.4. 负载估计功能
负载估计功能是指计算机器人末端负载的重量和其中心位置。Hi5控制器是以动力学为基础的控制器、因此计划动作时、计算各轴所产生的扭矩、以此为基础树立加速减速计划。
对于控制器内部的机器人机体、已经注册各个链接的重量、重量中心和惯量(inertia)。但是由于按照用户目的安装工具、因此应由用户亲自输入。如果通过CAD数据显示工具的重量和重量中心位置的话、用户能够亲自输入此值。在“『[F2]:系统』→『3:机器人参数』→『1:工具数据』”能够输入工具重量(kg)、中心和惯量(inertia)。
因为机器人的控制是基于动态模型进行的、所以您需要机器人及其负载的动态参数。您可以在设计阶段从CAD中得到机器人数据、不过负载数据是变化的而且也是无法计算的。正是因此才需要自动估计功能。
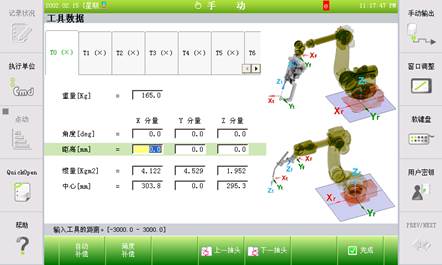
图 7.62 工具数据设置画面
但是在大部分的情况下难以从CAD数据获取工具的重量和重量中心信息。从中可见、在机器人控制器自动计算工具动态数据的功能就是负载估计功能。

图7.63 工具数据