7.6.4.5. 菜单构成
7.6.4.5. 菜单构成

图7.68 负载估计设置
(1) 用[SHIFT] + [←] [→]键确定工具编号(在当前机器人的末端)和负载估计方法编号。
(2) 移动机器人的位置、不要让负载计算程序干扰附近的夹具、然后按『[F7]:位置指定』键来指定机器人执行负载计算程序的起始位置。
(3) 按『[F1]:检查操作』键来检查机器人是否可能与周围物体发生碰撞。有碰撞的风险时、按『紧急停止』键停止机器人。
(4) 检查以后、按『[F2]:正常操作』键开始计算负载。
(5) 选择了<负载估计1>或<负载估计2>后、按『[F2]:正常操作』键机器人以一定的形态开始运行、以获取负载信息。机器人控制器自动计算负载数据并在下面的画面里显示负载数据 。
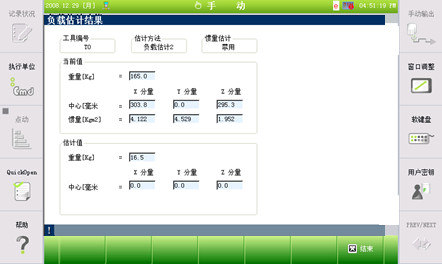
图7.69 负载估计结果
(6) 完成负载计算程序后、当以上负载计算结果显示时、按『[F7]:完成』键。将出现提示询问您是否反映计算结果。您按[YES(是)]键时、计算结果被反映到『[F2]:系统』→『3:机器人参数』→『1:工具数据』、如果您按[NO(否)]键、结果将不被反映。
n 工具编号
列举在机器人末端要使用的工具。Hi5 控制器可以使用范围为0~15的最多15个工具。
n 估计方法
① 无负载准备
制定无负载数据文件的方法如下、将机器人移动到没有受到任何影响的合适位置、按『[F7]:位置指定』键和『[F2]:正常操作』键。
② 负载估计1
内存里有无负载数据文件(机器人名称、NLD)时、选择负载计算1并按『[F2]:正常操作』键来测量重量和负载中心。如果没有无负载数据文件(机器人名称、NLD)、您如果按了『[F2]:正常操作』键、“没有无负载数据文件”的信息将出现在指南框里。
③ 负载估计2
内存里没有无负载数据文件(机器人名称、NLD)时、选择负载计算2并按『[F2]:正常操作』键来计算重量和中心。
n 惯量计算
此功能不仅计算工具负载重量和中心位置、还计算工具的惯量。因为机器人高速运行、所以务必检查运行情况、确定机器人是否运行安全且无干扰、以便计算工具惯量。
n 主轴启动位置指定
用来指定在估计方法里使用的机器人的起始位置。将机器人基轴移动到没有干扰的位置、按『F7:位置指定』键来指定起始位置。要使用负载估计1功能、应使用与制定无负载文件时起始位置相同的起始位置。
虽然S轴和H轴没有位置限制、但V轴应该将位置设置为-60度以上和+60度以下、还有如果V轴链接与地面平衡的话、有利于估计结果。
正如下面的第二个图片、在Hi5控制器的示教盒显示的V轴角度不是对地面的角度、而是对以前轴的角度、还有、正如下面的第一个图片、在原有的Hi4控制器用对地面的角度换算后显示V轴角度。

图7.70 [HX165-Hi4 H=40deg、V=0deg、V轴地面基准角度为0deg]

图7.71 [HS165-Hi5 H=40deg、V=0deg、V轴地面基准角度为-50deg]
在Hi5控制器V轴对地面的角度换算公式如下。
V轴对地面的角度=H轴角度+ V轴角度-90deg
在V轴链接和地面的角度不是-60deg~60deg的位置上按下『[F7]:位置指定』键的话、显示『V轴的角度应与地面维持60度以下的角度。』信息。.
轴的起始位置自动定义为R2=0.0度、B=-V度和R1=0.0度。换句话说、R2和R1轴设置为0度且B轴应该设置为与V轴相反、以保持水平位置。
① 当前值:表示机器人主轴(S、H、V)的位置度数。
② 指定值
如果存在无负载数据文件(ROBOT.NLD)、会显示机器人主轴(S、H、V)的角度。