2.1.2. 共同坐标系的设置
2.1.2. 共同坐标系的设置
为了检测机器人之间的Arm干涉、需要设置合作控制所需的共同坐标系。
① 设置共同坐标系之前请准备尖锐的工具、设置完自动常数。
② (『[F2]: 系统』 → 『6: 自动校准』 → 『1: 轴原点及工具长度最优化』)
③ 通过自动校准找出准确的工具信息的状态下进行3点教示。
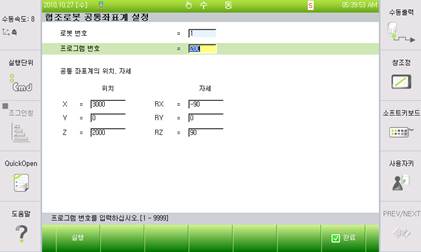
④ 『[F2]: 系统』 → 『6: 自动校准』 → 『5: 协作机器人公用坐标系设置』 用3点教示程序设置公用坐标系。
⑤ 对于详细内容请参考Hi5a合作控制用户手册。
对象机器人和自己的机器人一定要都设置共同坐标系。自己机器人的合作控制是无效的或没有设置共同坐标系的话不会进行点动和播放。
可发生的错误原因 | 自己的机器人是合作控制无效状态或没有设置共同坐标系而设置Arm干涉检测条件的情况 |
错误信息 | E1342 机器人合作状态、共同坐标系无效 |
措施方法 | 为了使用此功能、一定要事前设置机器人合作和共同坐标系。 |