2.1.3. 防止臂部干涉功能的设置
2.1.3. 防止臂部干涉功能的设置
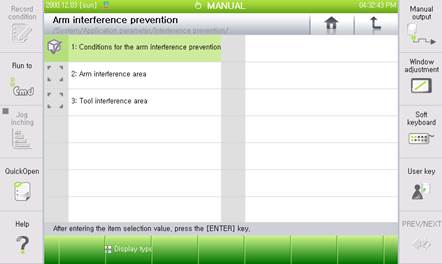
选择『 [F2]: 系统』 → 『4: 应用参数』 → 『7: 防止干涉』 → 『2: 防止臂部干涉』。
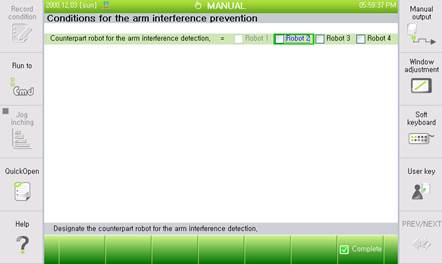
为了选择『1: 臂部干涉防止条件』把防止臂部干涉设置成有效、选择“臂部干涉检测对象机器人”。
可发生的错误原因 | 如果对于检测干涉、在自己的机器人设置的对象机器人的合作控制设置成“无效”、或 对象机器人没有参与合作控制HiNet网络、 没有设置对象机器人的Arm干涉防止条件、 最后没有设置对象机器人的共同坐标系的话会发生错误。 |
错误信息 | E0244 机器人 0)的Arm干涉检测处于不可能的状态。 |
措施方法 | 请检查如下内容。 |