2.1.4. 臂部干涉领域设置
2.1.4. 臂部干涉领域设置
臂部干涉领域的模型是由两面半球(Hemi-Sphere)组成的圆筒。比如、H轴的话正如下面从H轴接头位置到V轴 接头位置设置半径能够制造模型。

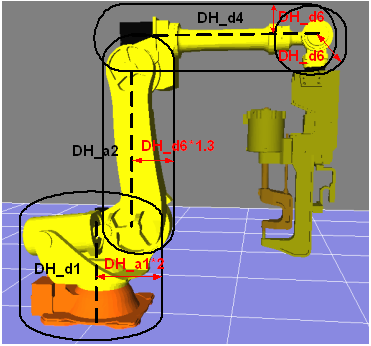
对于机器人机体臂部的圆筒链接模型适用于S轴、H轴、V轴和B轴。正如下面决定各轴的半径基本设定值。若在机器人追加安装设备的话、请把该轴的半径设置成比基本值更大后使用。
l S轴半径 : 设置从S轴的旋转中心到H轴接头距离的两倍
l H轴半径 : 从B轴旋转中心到Flange面距离的1.8倍
l V轴半径 : 从B轴旋转中心到Flange面的距离
选择 『[F2]: 系统』 → 『4: 应用参数』 → 『7: 防止干涉』 → 『2: 防止臂部干涉』 → 『2: 臂部干涉领域』的话能够查看现在基本设置的半径。若要修改基本设定值的话、输入设定值后按下PF7结束键。若要恢复到基本值的话、选择PF1 ALL初始化的话能够再次载入基本值。
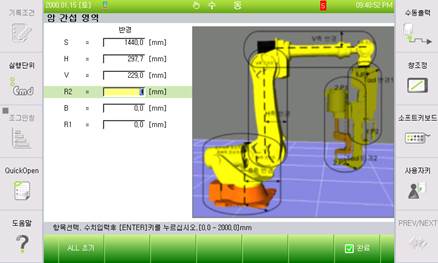
现在机器人臂部干涉支持以S、H、V轴的设定值能够检测所有轴。
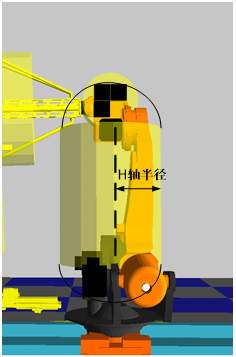
若想要使用比基本值更小的值、需要特别注意。比如、HS165之类串行链接的H轴的话正如上图从S轴中心往右边有offset。H轴的干涉检测领域的话正如上图以从S轴旋转中心沿着H轴链接连接到V轴旋转中心的线段为准设置、所以H轴半径应设置成从S轴旋转中心可包括所有H轴链接的大小。